
Fターム[5H560SS01]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289)
Fターム[5H560SS01]の下位に属するFターム
電池、バッテリ (747)
スイッチング電源 (27)
制御回路用電源が明記されているもの (9)
Fターム[5H560SS01]に分類される特許
501 - 506 / 506
ブラシレスモータの制御装置およびブラシレスモータ装置

【課題】 センサレス方式のブラシレスモータを円滑に再起動させることが可能なブラシレスモータの制御装置を提供する。
【解決手段】 本発明は、インバータ回路部20Aと、誘起電圧サンプリング部20Bと、擬似誘起電圧検出部20Cと、パルス位置信号検出部20Dと、位相補正部20Eと、通電ロジック制御部20Fとを備えたセンサレス方式ブラシレスモータ10の制御装置20に関する。
誘起電圧サンプリング部20Bは、陽極電源線25aと固定子巻線11u,11v,11wとの間に接続され分圧抵抗器24u1〜24w2にバイアス電圧をそれぞれ印加するバイアス抵抗器23u,23v,23wを有し、分圧抵抗器24u1〜24w2から全波誘起電圧信号を出力する構成である。
(もっと読む)
ブラシレスモータの制御装置

【課題】 ロータの位置検出が不安定にならないようにして、位置検出精度を高めることによって、信頼性の高いブラシレスモータの制御装置を実現する。
【解決手段】 ステータ巻線に発生する誘起電圧の立ち上がり時に、インバータ部の母線電圧を1/2した電圧を所定量だけ低電圧側にシフトした基準電圧と誘起電圧とを比較する。比較結果によりゼロクロス点が検出されると、前回の位置検出から今回の位置検出までの時間に基づいて電気角120度相当の時間を算出する。この時間に基づいてステータ巻線の通電を切り替える第1の切替時間と第2の切替時間を設定する。位置検出の時点から第1の切替時間経過後に1回目の通電切り替えを行い、さらに第2の切替時間経過すると、2回目の通電切り替えを行う。
(もっと読む)
モータ駆動装置
【課題】 ブラシレスDCモータの電圧低下率を低下させずに高速回転を行うと共に、広範囲の速度制御を実現する。
【解決手段】 回転駆動する回転軸を中心として複数に分割された複数の磁石が配列されてなる回転子と、当該回転子の周囲に前記回転軸を中心として配列され各相に対応した電流がコイルに供給される電機子とを備えたブラシレスDCモータ1を駆動するに際して、出力制御部9は、位置検出器4及び位置検出部5で検出された回転位置に基づいてPWMインバータ3のスイッチング素子をオンオフ状態を切換制御する2相の電機子を選定し、当該2相の電機子によって発生した磁束を電機子から回転子に与えて回転数を制御すると共に、他の1相の電機子を選定して、当該他の1相と接続されたPWMインバータ3のスイッチング素子をPWM制御する。
(もっと読む)
ブラシレスモータの制御装置
【課題】 昇圧回路2の温度上昇が大きくなることを防止することが出来るブラシレスモータの制御装置を提供する。
【解決手段】 本発明に係るブラシレスモータの制御装置は、直流の入力電圧を昇圧する昇圧回路2と、昇圧回路2の出力電圧を交流に変換してブラシレスモータ4に供給するインバータ3と、昇圧回路2の昇圧比及びインバータ3の動作を制御する制御回路5とを具えている。該制御回路5は、昇圧回路2の昇圧比を1よりも大きな値に設定する昇圧制御動作を開始した後、ブラシレスモータ4から発生する磁束を減少させるための動作をインバータ3に実行させる磁束制御動作を開始するものであって、ブラシレスモータ4に発生するトルクの大きさに応じて、磁束制御動作を開始する時点を変化させる。
(もっと読む)
直列共鳴コンデンサ放電モーター
2個のコンデンサ(22、23)および少なくとも1個のインダクタ(16)を用いて、電気モーターに使用するための交流磁界を形成する。一方のコンデンサ(22)より出る電荷はインダクタ16を通過し、磁界を形成し、および第2のコンデンサ(23)に捕捉される。エネルギーが第2のコンデンサ(23)に加えられ、次にインダクタ(16)を介して第1のコンデンサ(22)に放電されて、第1の放電によって形成された磁界と極性が反対の磁界を形成する。
【選択図】図1 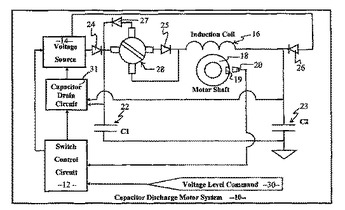 (もっと読む)
(もっと読む)
電動機駆動システム用のセンサレス制御方法および装置
拡張カルマンフィルタ(330)を使用して初期回転子位置を予測し、その後回転子位置および/または速度を様々なタイプの負荷条件下で正確に予測する方法および装置が、電動機(106)のための状態オブザーバ制御システム(600)を提供する。初期回転子位置の様々な設定から、推定回転子位置/速度を出力としてもたらすことができる、制御システムモデル(300)が生成される。制御システムモデル(300)は、EKF(拡張カルマンフィルタ)推定器(330)と、速度コントローラ(322)と、電流コントローラ(324)と、可変負荷構成要素(310)とを含む。動作中、EKF推定器(330)は、速度および電流コントローラ(322、324)とフレーム変換(326、328)からの入力によって生成された基準電圧(402、404)および基準電流(1325)に基づいて、回転子速度(327)および位置(333)を推定する。さらに、基準電圧および基準電流(402、404、1325)は、システム(600)内のフィードバック信号(418、346)として、かつ電動機負荷(602)に印加する電力を制御するための駆動信号として使用されるように、フレーム変換される。  (もっと読む)
(もっと読む)
501 - 506 / 506
[ Back to top ]