
Fターム[5H560TT05]の内容
無整流子電動機の制御 (40,007) | 回路要素 (3,527) | 差動増幅器(2入力型オペアンプ、単なる増幅器は除く) (69)
Fターム[5H560TT05]に分類される特許
1 - 20 / 69
モータ駆動装置
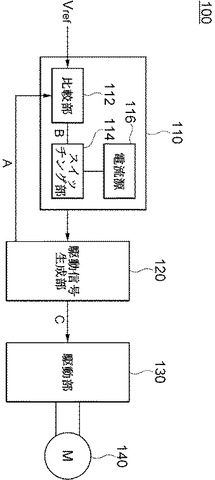
【課題】モータ性能を向上するモータ駆動装置を提供することにある。
【解決手段】モータ駆動装置100は、モータを駆動するモータ駆動信号を生成する駆動信号生成部120と、この駆動信号生成部120の前段に設けられ、プルアップ動作時、駆動信号生成部120のスイッチがオン/オフする時発生される電磁波妨害によって引き起こされるモータの振動またはノイズを防止するように、駆動信号生成部120の電流を調節する電流制御部110と、駆動信号生成部120から出力されるモータ駆動信号に基づいてモータを駆動する駆動部130とを含む。
(もっと読む)
モータ駆動装置及び記録装置

【課題】ホール素子自体の実装位置がずれている場合であっても、あるいは加減速を頻繁に繰り返す駆動形態においてもモータの駆動上の誤差を正確に補正すること。
【解決手段】モータ駆動装置であって、複数相のコイルと、ロータの回転に応じて電圧を出力する複数の検出手段とを有するブラシレスモータと、制御信号に基づいて前記複数相のコイルに対する電流の供給先を切り替えることによって、前記ブラシレスモータを駆動する駆動手段と、前記複数の検出手段から出力される検出信号と、前記ロータの回転角に応じた予め求めた電圧と前記複数の検出手段から得られる前記ロータの回転角に応じた電圧との差に基づいた補正信号との加算結果に基づいて、前記制御信号を生成する生成手段とを備える。
(もっと読む)
モータ駆動装置及びモータ駆動方法
【課題】一方の極性の電流しか検出できないスイッチング素子に内蔵される検出用素子により電流を検出してモータを制御する場合、力行状態と回生状態とを判定して通電を制御することで脱調を回避する。
【解決手段】グランド側に接続される各相の半導体スイッチング素子に電流検出機能付きのIGBT4X〜4Zを用いてインバータ回路3を構成する。極性検出部は、IGBTを全てオンしてモータ1の各相巻線2U,2V,2Wが短絡されているときにセンスIGBT7X,7Y,7Zを介して流れる電流に基づきU,V相間電流のゼロクロスタイミングを検出し、変化極性検出部は、U,V相間電流の変化量のゼロクロスタイミングを検出する。電流極性検出回路11がW相電流の極性を判定すると、力行・回生判定部は、W相電流の極性に応じてモータが力行状態か回生状態かを判定し、起動処理部は、回生状態と判定されるとスイッチング制御を停止する。
(もっと読む)
単相ブラシレスモータの駆動回路
【課題】 ホール素子などの位置検出素子を用いないで単相ブラシレスモータを駆動することで、モータの小型化や低コスト化を実現する。
【解決手段】 単相ブラシレスモータの駆動コイルに第1および第2駆動電流をいずれも供給しない非通電期間を挟んで、駆動コイルに第1駆動電流と第2駆動電流とを交互に供給するための駆動信号を生成する駆動信号生成回路と、駆動信号に応じて駆動コイルに第1または第2駆動電流を供給する出力回路と、非通電期間に、駆動コイルに発生する誘起電圧のゼロクロスを検出するゼロクロス検出回路と、を有し、駆動信号生成回路は、出力回路が駆動コイルに第1または第2駆動電流を供給する通電期間の開始から、ゼロクロス検出回路がゼロクロスを検出するまでの駆動周期に基づいて、次の通電期間の長さを決定し、ゼロクロス検出回路は、非通電期間の開始から所定時間経過後にゼロクロスの検出を開始する。
(もっと読む)
モータ駆動装置及びこれを用いたモータ装置
【課題】電力効率の低下やS/Nの低下を招かずにロータ位置検出信号の自動利得制御を行うことが可能なモータ駆動装置、及び、これを用いたモータ装置を提供する。
【解決手段】本発明に係るモータ駆動装置1は、ロータ位置検出信号(ホール電圧信号HU+/HU−、HV+/HV−、HW+/HW−)が伝達される信号経路上に自動利得制御回路20を備えており、自動利得制御回路20は、入力信号(進角ホール電流信号AU+/AU−、AV+/AV−、AW+/AW−)を差動増幅して出力信号(増幅ホール電流信号IU、IV、IW)を生成するアンプ21と、前記出力信号(モニタ電流信号IUm、IVm、IWm)を監視してアンプ21の利得を決定する帰還制御部23と、を含む。
(もっと読む)
モータ制御装置
【課題】異常が発生した場合においても安定したモータ駆動を続けることができるモータ制御装置を低コストで提供する。
【解決手段】モータ制御装置1の各相に電流遮断回路23、38を設ける。プリドライバ回路12〜14のスイッチ素子20、21、35、36のいずれかに外乱が印加され、接合破壊のために短絡故障して大電流が流れたときに、電流遮断回路23、38によって故障したプリドライバ回路12、13または14に流れる電流を遮断し、電源電圧の低下を防ぐ。
(もっと読む)
モータ駆動装置
【課題】インバータ回路により複数のモータを駆動する洗濯機等のモータ駆動装置において、装置の小型化、部品削減、実装面積削減、低コスト化を実現する。
【解決手段】負電圧の入力が可能であるとともに増幅率を切換え可能な差動増幅回路を備えた電流検知ICとシャント抵抗によりモータ電流を検出し、制御手段が駆動するモータに応じて負荷リレーと電流検出ICの増幅率を切替えてモータ制御を行うようにしたものであり、電流検出手段の小型化、およびモータごとに電流検出手段を実装する必要がなり、装置の小型化、部品削減、低コスト化を実現することができる。
(もっと読む)
交流電動機の駆動装置及び電動機車両
【課題】交流電動機の極低速域のセンサレス駆動を、高調波電圧を意図的に印加することなく、理想的なPWM波形にて、ベクトル制御を行う交流電動機の駆動装置を提供する。
【解決手段】交流電動機の電流検出と、電流変化率の検出を行い、この電流変化を与えているインバータの出力電圧を考慮して、交流電動機内部の磁束位置の推定演算を行う。電流変化率は、インバータのパルス波形によって発生するため、意図的な高調波の印加を行うことなく、交流電動機の磁束位置を推定演算できる。
(もっと読む)
ビーム照射装置
【課題】ミラーを2軸駆動してレーザ光を走査させる場合に、ミラーの駆動制御を精度よく行うことができるビーム照射装置を提供する。
【解決手段】レーザ光を水平方向斜めからミラー113に入射させた状態で、ミラー113を支軸111、112と支軸124、125の回りに回動させて、レーザ光を水平方向に走査させる。このとき、支軸111、112の回りの前記ミラー113の回動位置に応じて、支軸124、125の回りの前記ミラー113の制御量を変化させる。具体的には、支軸124、125の回りにおいて前記ミラー113を制御するためのPID制御回路28からの制御信号の大きさを、ゲイン調整回路29におけるゲインを調整することで変化させる。
(もっと読む)
モータ駆動制御回路
【課題】モータの誘起電流を効率的に検出する。
【解決手段】差動アンプ30は、同期モータ20の定常回転時におけるコイル電流Isを検出する。そのときの印加電圧S0をATT回路14からの出力などから検出する。検出されたコイル電流Isと、その時の印加電圧S0と、予め決定したスケーリングファクタAsを用い、誘起電流Ibを、Ib=As・S0−Isにより求める。求められた誘起電流Ibに基づいて、モータへの印加電圧を制御する。
(もっと読む)
モータ制御装置
【課題】モータ,電力変換器、或いはモータ間の任意の2相に挿入された電流検出用のシャント抵抗或いは電力変換器を変更して、3相の抵抗値が変化した場合に、補償電圧波形メモリに設定したテーブルを更新しないとトルクリプルを抑制できない。
【解決手段】d軸及びq軸の電流指令値,磁極位置,「3相不平衡成分」の抵抗設定値を入力して、所定の数式を用いて演算した電圧指令値の補正量を電圧指令値に加算することにより、トルクリプルを抑制する。
(もっと読む)
モータ制御装置
【課題】モータの諸元に依存せずに電圧指令値の飽和を解消してモータを適切に制御できるモータ制御装置を提供することである。
【解決手段】上記した目的を達成するため、本発明の課題解決手段は、モータMの駆動電流をdq直交座標に変換するdq変換を用いてd軸およびq軸の電流値id,iqを求め各軸毎に電流ループ処理を行ってモータMをベクトル制御するモータ制御装置1において、dq各軸の電圧指令値Vd*,Vq*の合成ベクトルVdqの飽和を判断する判断手段4を備え、判断手段4でdq各軸の電圧指令値Vd*,Vq*の合成ベクトルVdqが飽和していると判断されると、合成ベクトルVdqの長さLと制限電圧Vlimに基づいて電流ループに入力するトルク指令を補正する。
(もっと読む)
三相DCモータ制御回路
【課題】駆動電圧位相をモータ起動時においても適切に制御でき、さらには電源への逆流電流が発生しないモータ駆動方式を提供する。
【解決手段】三相DCモータに対し帰還制御を行う際、モータ自体が正弦波状の脈動成分を持つため、単に帰還させるだけでは交流成分が三相DCモータに加わる問題がある。従来は、補正用の脈動成分を加えた後に、モータからの帰還制御を行っていた。本発明においては、電流誤差検出部100で従来の補正を加えるだけでなく、電流誤差検出部100の出力(PWMD)をさらに帰還させ、そのデューティに応じてループゲインを切り替えることで、モータの低回転時においても有効な制御方法を提供することが可能となる。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】矩形波制御時に制御周期を短くすることなく指令値通りに電圧を出力させ、高精度なトルク制御を実現する。
【解決手段】 電圧位相角指令値を算出する電圧位相制御部と、一定の周期でカウントするカウンタと、記録部に予め電圧位相角指令値に関連付けて記録されている矩形波電圧の変更タイミングを参照して、一定の周期よりも長い制御周期ごとにインバータの出力電圧の電圧位相角が変更タイミングの電圧位相角であるかを判定するとともに、電圧位相角指令値と変更タイミングの電圧位相角との差分値を算出し、差分値と制御周期の1周期に対応する電圧位相角との比率に制御周期の1周期にカウンタがカウントするカウント値を積算した変更カウント値を算出する出力タイミング計算部と、変更タイミングの電圧位相角から変更カウント値の分のカウント後に矩形波電圧の状態を変化させる矩形波発生部と、を備えたモータ制御装置である。
(もっと読む)
モータ制御駆動装置
【課題】従来よりも、推定したロータの位相の誤差を低減することが出来るものを提供することを目的とする。
【解決手段】モータ制御駆動装置が、センサレス制御方式の永久磁石同期モータの各相巻線に電圧を供給することによって永久磁石同期モータを駆動するモータ制御駆動装置であって、永久磁石同期モータへ供給する相電圧を検出する相電圧検出手段と、相電圧のゼロクロス点を検出するゼロクロス点検出手段と、ゼロクロス点から永久磁石同期モータのロータの位相推定値を算出する位相演算手段と、ゼロクロス点のタイミングで、位相推定値をゼロクロス点に応じた適正値に補正することによって補正位相推定値を算出する位相補正手段とを具備する。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、位置型PI演算によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。異常監視部25は、加算角αおよび検出操舵トルクTを監視することによって、制御異常の有無を監視する。制御異常のときには、位置型PI制御部23の積分項が初期化される。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTを指示操舵トルクT*に近づけるように、PI制御部23によって、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。PI演算の比例項が異常値となると、指示電流値Iγ*が減少補正され、PI演算の積分項が初期化され、加算角リミッタ24による制限値が既定値よりも小さな値に変更される。
(もっと読む)
モータ制御装置
【課題】回転角センサを用いない新たな制御方式でモータを制御することができるモータ制御装置を提供する。
【解決手段】仮想回転座標系であるγδ座標系のγ軸電流Iγでモータが駆動される。γδ座標系は、制御上の回転角である制御角θCに従う座標系である。制御角θCとロータ角θMとの差(負荷角θL)に応じたアシストトルクが発生する。一方、検出操舵トルクTがフィードバックされ、検出操舵トルクTを指示操舵トルクT*に近づけるように、加算角αが生成される。加算角αが制御角θCの前回値θC(n-1)に加算されることにより、制御角θCの今回値θC(n)が求められる。加算角αは、加算角リミッタ24による制限を受ける。検出操舵トルクTが飽和状態となると、制限値変更部27は、加算角リミッタ24による制限値を既定値よりも小さな値に変更する。
(もっと読む)
モータ制御装置及びドラム式洗濯機
【課題】モータの運転中に永久磁石が意図せずに減磁した場合でも、着磁状態の復帰を図ることができるモータ制御装置を提供する。
【解決手段】着磁制御部59は、減磁検出部58が、モータ1の運転中にアルニコ磁石が着磁された状態から減磁したことを検出すると、アルニコ磁石を再度増磁することで磁力を復帰させる。減磁検出部58は、誘起電圧指令決定部57がモータ1の運転状態に応じて決定すると誘起電圧指令Eq_refと、誘起電圧検出部56により検出された誘起電圧Eqとを比較し、前者に対して後者が所定の割合若しくは所定値だけ低下した場合に、アルニコ磁石9bの減磁を検出する。
(もっと読む)
モータ制御装置、及びコンピュータプログラム
【課題】3相ブリッジ回路の上流側スイッチング素子をPWM駆動しつつ、発熱を抑え、モータの安定駆動を可能とする。
【解決手段】コントローラから供給される位置指令Porderモータの実際の位置Prealとの偏差Pε=Porder−Prealを加算器311で求め、偏差Pεに基づいて、3相ブリッジ回路の下流側のスイッチング素子をパルス幅変調により駆動する。さらに、位置指令Porderの変化率の絶対値|dPε/dt|を指令速度変換部322で求め、位置指令の変化分の絶対値|dPε/dt|が大きくなるに従ってデューティが小さくなり、かつ、偏差Pεが大きくなるに従ってデューティが大きくなるように、3相ブリッジ回路の上流側のスイッチング素子をパルス幅変調により駆動する。
(もっと読む)
1 - 20 / 69
[ Back to top ]