
Fターム[5H560XB02]の内容
無整流子電動機の制御 (40,007) | その他の制御上の特徴 (212) | 通電波形重なり禁止 (11)
Fターム[5H560XB02]に分類される特許
1 - 11 / 11
H型ブリッジ回路およびモータ駆動装置
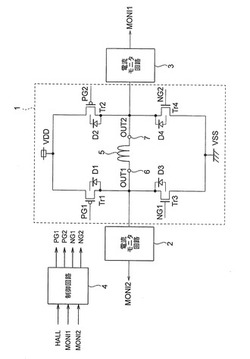
【課題】モータに適用した場合に、回転効率を犠牲にすることなく、逆流電流の発生を防止できるようにしたH型ブリッジ回路などの提供。
【解決手段】この発明は、MOSトランジスタTr1〜Tr4からなるH型ブリッジ1と、電流モニタ回路2、3と、制御回路4とを備える。電流モニタ回路2、3のそれぞれは、コイル5に流れる電流を検出し、この検出に応じた信号を電流判定信号MONI1、電流判定信号MONI2として出力する。制御回路4は、コイル5の通電方向を切り換える切換信号HALLと、電流モニタ回路2、3から出力される電流判定信号MONI1、MONI2とを基に、制御信号PG1、PG2、NG1、NG2を生成し、MOSトランジスタTr1、Tr2をオンオフ制御する。
(もっと読む)
回転機の制御装置

【課題】モータジェネレータ10を流れる電流の検出値をフィードバック制御するための操作量としての指令電圧の1電気角周期に渡る積分値をゼロにフィードバック制御する場合、電気角の検出値に誤差が生じることで、電流の検出値に重畳されたオフセット誤差を適切に補正できないこと。
【解決手段】モデル予測制御部30では、モデル予測制御によってインバータINVの今回の操作状態を表現する電圧ベクトルViを選択する。積分値算出部40では、電圧ベクトルViを入力とし、各相の印加電圧の積分値Δvu,Δvv,Δvwを算出する。補正部44u,44v,44wでは、これらをゼロにフィードバック制御すべく実電流iu,iv,iwを補正する。
(もっと読む)
回転機の制御装置
【課題】デッドタイム付与後の実際のスイッチング状態の切替タイミングが複数のレッグ間で重なることで、サージ電圧が大きくなるおそれがあること。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータINVの出力電圧ベクトルのノルムを設定する。位相設定部26では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部34では、ノルム設定部30によって設定されたノルムVnと、位相設定部26によって設定された位相δとに基づき操作信号を生成してインバータINVに出力する。操作状態設定部34には、デッドタイム付与後における実際のスイッチング状態の切り替えが複数レッグで同時になされない波形が記憶されている。
(もっと読む)
モータ駆動制御装置及び画像形成装置
【課題】素早くかつ安定にモータを起動することができるモータ駆動制御装置を提供する。
【解決手段】モータ10を停止状態から起動するときは第1の駆動方式である矩形波駆動により回転駆動し、回転中は矩形波駆動または第2の駆動方式である正弦波駆動を切り替えて回転駆動する。これにより、回転位置が正確に得られない起動時は分解能の低い回転位置情報だけでも高トルクを発生可能な駆動方式でモータを駆動し、起動して高分解能の回転位置が得られるようになってから、正弦波駆動に駆動方式を切り替えることができる。そのため、素早くかつ安定にモータを起動することができる。
(もっと読む)
電動パワーステアリング装置
【課題】
モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】
回転角補正演算手段は、モータの回転角が所定範囲内にあり、モータの回転角が所定範囲内で増加している場合には、モータの回転角を、モータの回転角の所定範囲内の最大値に固定し、モータの回転角が所定範囲内で減少している場合には、モータの回転角を、モータの回転角の所定範囲内の最小値に固定する。
(もっと読む)
電動パワーステアリング装置
【課題】モータを駆動する各相電流指令値のゼロクロス時においても、モータからの振動及び異音が発生することがなく、操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】デッドタイム補償演算手段は、各相電流指令値がゼロ近傍の所定範囲内にある場合には、モータの回転角速度に応じて各相のデッドタイム補償量を変え、回転角速度の絶対値が所定値より小さい場合には、回転角速度の絶対値が小さくなるに従い、各相のデッドタイム補償量を漸減させる。
(もっと読む)
モータ制御装置及びバルブタイミング調整装置並びにインバータ回路の通電制御方法
【課題】モータの実回転方向が回転方向指令と逆になった場合に、フリーホイールダイオードにおいて発生する損失を軽減できるモータ制御装置を提供する。
【解決手段】制御回路60は、外部より指令として与えられるモータ4の目標回転方向Dtと、回転角センサSU,SV,SWが出力するセンサ信号に基づき信号生成ブロック72により検出されるモータ4の実回転方向Drとが相違する方向不一致状態を検出すると、120度通電方式から180度通電方式に切り替えてインバータ部76を構成する上段スイッチング素子FU,FV,FWのオン期間を進み位相側に拡げるように制御し、還流電流を上段スイッチング素子FU,FV,FWを介して流す。
(もっと読む)
モータ駆動装置
【課題】モータが高速に回転する場合にも、トルクリップルや異音の発生を抑制することが可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置100は、インバータ1と、インバータ1を制御する制御部2とを備える。制御部2は、電流指令値を算出する電流指令値算出部21と、モータ150の回転角度θおよび角速度ωを算出する回転演算部22と、PWM信号を生成する駆動信号生成部24と、インバータ1のデッドタイムを補償するために、PWM信号を補正するための補正信号を生成する補正信号生成部25と、補正信号により補正されたPWM信号にデッドタイムを付加して、インバータ1に出力する印加電流設定部27とを含む。補正信号生成部25は、電流指令値と、回転演算部22により算出された回転角度θおよび角速度ωとに基づいて、補正信号を生成する。
(もっと読む)
ブラシレスモータ駆動回路
【課題】電源電圧が変化しても、出力電圧を適切な電圧にクランプすることができるようにする。
【解決手段】プリドライバ回路によって、駆動用電圧生成回路14のHブリッジ回路26のPMOSトランジスタM11、M13及びNMOSトランジスタM12、M14をオンオフさせて、電源電圧から、ブラシレスモータ駆動用の電圧を生成し、ブラシレスモータのコイル12に印加する。第1クランプ回路32によって、出力端子28における出力電圧が、電源電圧に対応する電圧以下となるように、接地側のNMOSトランジスタM12をオンオフさせる。第2クランプ回路34によって、出力端子30における出力電圧が、電源電圧に対応する電圧以下となるように、接地側のNMOSトランジスタM14をオンオフさせる。
(もっと読む)
モータ駆動制御装置、モータ駆動制御方法及び座標変換方法、並びに換気扇、液体用ポンプ、送風機、冷媒圧縮機、空気調和機及び冷蔵庫
【課題】デッドタイムの電圧誤差によるモータ電流の位相差誤差を抑制して、2相の同期電動機を動作させることができる、モータ駆動制御装置、モータ駆動制御方法及び座標変換方法、並びに換気扇、液体用ポンプ、送風機、冷媒圧縮機、空気調和機及び冷蔵庫を得る。
【解決手段】整流回路2と、PWM制御により直流電圧を交流電圧に変換してモータ7に印加するインバータ回路5と、モータ7の固定子巻線8に流れる電流を検出する電流検出手段11と、電流検出手段11が検出した電流に基づき、モータ7を駆動するための出力電圧指令値を求め、インバータ回路5のデッドタイムによる電圧誤差の影響を抑制するように、出力電圧指令値を2相の固定子巻線8に与える電圧座標に座標変換し、該変換された出力電圧指令値に基づき、インバータ回路5をPWM制御するセンサレス制御手段10とを備える。
(もっと読む)
電動パワーステアリング装置
【課題】長時間操舵を継続した場合にもトルクリップルを生じることなく、良好な操舵感を実現し得る電動パワーステアリング装置を提供する。
【解決手段】運転者の操舵力を検出するトルクセンサ2と、運転者の操舵力を補助する3相ブラシレスモータ3と、この3相ブラシレスモータ3の電流を制御する制御装置4とから成り、電界効果トランジスタで構成されるインバータ回路41にて3相ブラシレスモータ3をPWM駆動すると共に、下側電界効果トランジスタFET4〜FET6のソースとグランドGの間に配設した電流検出抵抗411〜413の両端電圧差を差動増幅し、下側電界効果トランジスタFET4〜FET6のオン期間の差動増幅出力からオフ期間の差動増幅出力を減じて3相ブラシレスモータ3の相電流を検出し、この相電流をトルクセンサ2にて検出した運転者の操舵力に応じて制御する。
(もっと読む)
1 - 11 / 11
[ Back to top ]