
Fターム[5H560XB04]の内容
無整流子電動機の制御 (40,007) | その他の制御上の特徴 (212) | オフセット補償 (143)
Fターム[5H560XB04]の下位に属するFターム
Fターム[5H560XB04]に分類される特許
1 - 20 / 41
モータ制御装置、モータ制御方法
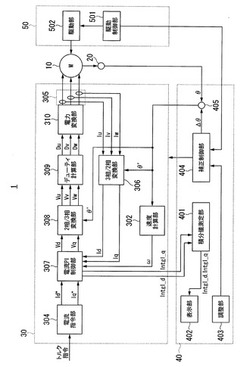
【課題】モータを精度良く制御することを可能にするモータ制御装置、及びモータ制御方法を提供することを目的としている。
【解決手段】電流指令値から、電圧指令値を生成し、モータに流れる検出電流によりフィードバック制御するモータ制御装置であって、モータが一定速度で回転されているとき、d軸電流指令値及びq軸電流指令値を各々零に設定する補正制御部と、電流指令値と検出電流との偏差の積分値を生成する電流制御部と、生成された積分値を測定する積分値測定部と、を備え、補正制御部は、測定された積分値が予め定められている範囲内の値となるように調整することで前記モータの回転位置に対する補正値を調整する。
(もっと読む)
ブラシレスDCモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスDCモータの制御回路

【課題】ブラシレスDCモータの回転数のばらつきを抑制するブラシレスDCモータの制御回路の調整装置、調整方法、調整プログラム、及びブラシレスDCモータの制御回路を提供することを課題とする。
【解決手段】ブラシレスDCモータ5の制御回路16の調整装置22であって、前記ブラシレスDCモータ5のロータ19を所定の電気角にした際の回転角センサ20の出力値をブラシレスDCモータ5の極対数分取得し、取得した出力値の平均値を、制御回路16が前記回転角センサ20の信号に基づいてブラシレスDCモータ5に給電する電流の位相を調整するオフセット値として制御回路16に設定する処理部23を備える。
(もっと読む)
モータ制御装置
【課題】電流オフセット値の急激な変化を抑制して、安定した操舵フィーリングを維持できるモータ制御装置を提供する。
【解決手段】モータ電流がゼロとみなされる状態で検出されたドリフト電流の検出電流値を電流オフセット値として設定し、当該電流オフセット値によりモータ電流の検出電流値を補償するモータ制御装置において、所定の周期Tごとにドリフト電流を検出し、検出したドリフト電流の検出電流値に基づいて、周期Tごとに目標オフセット値を設定する。電流オフセット値が目標オフセット値より小さい場合は、電流オフセット値に補正値Kを加算し、電流オフセット値が目標オフセット値より大きい場合は、電流オフセット値から補正値Kを減算することにより、電流オフセット値を周期Tごとに補正する。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
モータ駆動装置
【課題】簡単なアルゴリズムで1シャント方式により3相モータの相電流を安定に検出でき、サンプリング手段を他の用途や複数モータにも使えるようにしたモータ駆動装置を提供する。
【解決手段】各コイル端子27に印加すべき電圧レベルに応じたデューティ比で、3相の変調パルスを生成する。3相の変調パルスのうち最も長いパルスのパルス幅V1に応じて、第1シフト量d1として少なくとも2つの所定量d11,d12のうちからいずれか1つを選択する。そして、3相の変調パルスのうち2番目に長いパルスを第1シフト量だけ後ろにシフトしてタイミングを遅らせ、3番目に長いパルスを所定の第2シフト量だけ後ろにシフトしてタイムングを遅らせる。このシフト結果を反映した3相の変調パルスでそれぞれスイッチングして、各コイル端(U,V,W)をパルス駆動する。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】多相モータの各相の電流の位相遅れをそれぞれ補正するモータ制御装置を提供することである。
【解決手段】多相モータに接続され、直流電力を交流電力に変換する電力変換手段と、多相モータの少なくとも2相の相電流をそれぞれ検出する複数の電流検出手段と、多相モータの各相の相電流の位相遅れ量をそれぞれ設定する位相遅れ量設定手段と、複数の電流検出手段により検出された2相の相電流を含む、前記各相の固定座標系の相電流を回転座標系の電流に変換する座標変換手段と、座標変換手段により変換された回転座標系の電流と、外部から入力される多相モータの出力目標値に基づいて、電力変換手段を制御する制御手段とを備え、座標変換手段は、位相遅れ量設定手段により設定された各相の位相遅れ量に基づき各相に対応する複数の補正値を設定し、複数の補正値を用いて固定座標系の相電流を回転座標系の電流に変換する。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】交流電圧を整流して整流電圧を供給する段階と整流電圧でモータの巻線を励起する段階とを含むブラシレスモータを制御する方法。巻線は、交流電圧のゼロ交差に応答して更新される進み期間だけ所定の回転子位置に先行して励起される。更に、本方法を実施する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】交流電圧を整流して整流電圧を供給する段階と、モータの各電気半サイクルにわたって導通期間中に整流電圧でモータの巻線を励起する段階と、交流電圧内のゼロ交差に応答して導通期間を更新する段階とを含むブラシレスモータを制御する方法。更に、本方法を実行する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
DCモータ制御装置および換気装置
【課題】高精度のトルク電流情報を出力できるDCモータ制御装置、および前記DCモータ制御装置を用いて換気扇の定風量制御を精度よく行える換気装置を得ること。
【解決手段】DCモータ制御装置7は、直流電圧(DC140V)をPWM駆動信号に基づきスイッチングしてDCモータ6への駆動電圧を出力するインバータ回路11と、前記インバータ回路のスイッチング回路11aにおける母線電流をモータ電流として検出するモータ電流検出回路(12,13)と、外部からの速度指令に従い前記PWM駆動信号を生成出力し、検出された前記モータ電流を前記駆動電圧の前記直流電圧に対する割合で除算してトルク電流を求め、求めた前記トルク電流の情報と、モータ回転速度を示す回転パルス信号とを外部へ出力する制御回路10とを備えている。
(もっと読む)
インバータ装置
【課題】入力電流波形の改善と、高力率化を実現するとともに、簡単な構成で精度の高い位相制御が可能なインバータ装置を提供する。
【解決手段】直流電圧検出部16は、電圧検出ユニット30から与えられた直流電圧信号をモニタリングして、所定の電圧レベル以上となった場合に、検出信号をサンプリング判定部17に出力する。サンプリング判定部17は、検出信号に応じてモータ電流検出アンプ部6から与えられたモータ電流信号を所定のタイミングでA/D変換して取込む。位相差検出部8は、サンプリング判定部17でA/D変換されたモータ電流信号のサンプリングデータについて、2個所のモータ駆動電圧位相期間ごとにサンプリングした各電流サンプリングデータを積算してモータ電流信号面積とし、両モータ電流信号面積の面積比を位相差情報として出力する。
(もっと読む)
モータ駆動装置およびモータ駆動方法
【課題】センサレスモータを低回転域で安定的に駆動する。
【解決手段】ゼロクロス検出部(70)は、モータ(1)の中性点電圧と少なくとも一つの巻線の逆起電圧とを比較してゼロクロスを検出するごとに第1の信号(BEMF)を出力する。周期検出部(90)は、第1の信号(BEMF)の周期を検出し、当該周期の終わりの一部期間に第2の信号(WINDOW)を出力する。通電停止部(30)は、少なくとも第2の信号(WINDOW)が出力されている間、モータ(1)の全巻線への通電を停止する。ここで、ゼロクロス検出部(70)は、第2の信号(WINDOW)が出力されている間だけゼロクロスを検出する。
(もっと読む)
モータ制御装置
【課題】回路面積を削減し、コストを低減できるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、3相ブラシレスモータ2へ3相各相の駆動電流を供給するドライバ3U、3V、3Wに接続されたシャント抵抗4U、4V、4Wに発生する電圧を増幅するアンプ11U、11V、11Wと、アンプ11U、11V、11Wにより増幅された電圧をサンプリングして保持するサンプルホールド回路12U、12V、12Wと、サンプルホールド回路12U、12V、12Wにより保持されている電圧値を順次選択して出力するマルチプレクサ13と、マルチプレクサ13の出力信号をA/D変換するA/D変換器14と、A/D変換器14の出力信号から前記駆動電流を算出し、前記駆動電流に基づいて、モータ2の磁極位置を推定し、ドライバ3U、3V、3Wを制御して前記駆動電流をPWM制御する演算部15と、を備える。
(もっと読む)
電動パワーステアリング用モータの制御装置
【課題】通常の精度のアンプを用いて高精度な電流検出を行うことができ、また、温度が変化しても電流検出精度の劣化がないモータ制御装置を提供する。
【解決手段】モータ17へ駆動電流を供給するためのスイッチ回路10と、駆動電流を検出するための抵抗7と、抵抗7における両端の電位差を増幅するための増幅回路2と、増幅回路2の入力部に設けられ、電位差を正転または反転させるように切り替える入力部スイッチ手段15と、増幅回路2の出力部に設けられ、増幅回路の出力電圧を正転または反転させるように切り替える出力部スイッチ手段20と、増幅回路2の出力電圧を正転させたときの電圧及び反転させたときの電圧を平均化するCPU50とを備えている。
(もっと読む)
モータ制御装置
【課題】回転角検出部の取り付け誤差に起因する3相モータの効率と出力精度の劣化と防止することが可能なモータ制御装置を提供する。
【解決手段】モータ制御装置100は、3相モータ12の停止時において、ロータの回転角を初期回転角として検出する回転角検出部11と、停止時において、ロータに配設された永久磁石が発生する磁界の方向であるd軸に直交するq軸に印加するq軸の電圧指令値を設定するq軸電圧設定部7と、q軸の電圧指令値を3相各相の3相電圧指令値に変換する2相/3相変換部3と、3相電圧指令値の印加に応じて通電されるモータ電流に基づいて、d軸のd軸電流を演算する3相/2相変換部6と、d軸電流がゼロでない場合に、d軸電流がゼロとなるように初期回転角を補正する補正回転角を設定する補正回転角設定部8と、を備える。
(もっと読む)
モータ駆動方法およびその装置
【課題】特別にバラツキの少ない回路を採用しなくても、零レベルの変化の影響を排除して精度の高いロータ位置の検出を達成する。
【解決手段】モータ電流の検出値を補正するために、モータを駆動しない期間中に、インバータの上アームのスイッチングトランジスタを全てオフにしてかつインバータの下アームのスイッチングトランジスタを全てオンにするか又は、インバータの上アームのスイッチングトランジスタを全てオンにしてかつインバータの下アームのスイッチングトランジスタを全てオフにして、インバータから零ベクトルを出力して、モータ電流を検出する検出手段からの出力を零レベルとして検出する。
(もっと読む)
モータ制御回路
【課題】 起動時や低回転時であってもゼロクロスタイミングを検知し、回転子の回転位相と同期した制御を行うことができ、これにより異音、回転脱調、停止等を回避、低減することができるモータ制御回路を提供すること。
【解決手段】 モータ回転制御を行う制御回路2と、複数相コイル5u,5v,5wに所定の基準電圧を供給するモータ相コイルバイアス回路6を備え、制御回路2は、モータ5を駆動しない慣性回転状態で、基準電圧にバイアスされた状態のコイルから検出した逆起電力の電圧ゼロクロスタイミングに基づいてモータ回転制御を行った。
(もっと読む)
車両駆動用モータ制御装置
【課題】冷却機能を有する車両駆用モータ制御装置において、冷媒管中の冷媒の流通が滞った場合におけるモータ制御装置の温度上昇を回避することを目的とする。
【解決手段】コントロールユニット26は、昇圧コンバータ12、第1インバータ14、および第2インバータ18がそれぞれ備えるIGBTの測定温度に基づいて、冷却水の推定温度を求める。また、コントロールユニット26は、昇圧コンバータ12、第1インバータ14、および第2インバータ18がそれぞれ備えるIGBTの測定温度に基づいて、またはポンプ40の動作状態に基づいて冷却系の異常を検出する。コントロールユニット26は、異常が検出されたときには、推定温度にオフセット値を加えた値に対しトルク制限マップによって示されるトルク制限値に基づいて第2モータジェネレータ20を制御する。
(もっと読む)
同期機のオフセット角度の検出方法
本発明は、ステータと、ロータと、該ロータに接続されている軸とを有する電気機械のオフセット角度を検出する方法に関する。本発明によれば、軸が実質的に負荷のない状態にされ、ステータによって形成されるステータ磁界の配向に関して、ロータによって形成されるロータ磁界の配向に対応する磁界角度で、ステータに対してロータが配置され、軸と接続されている角度センサを用いた測定により、磁界角度に対応付けられているセンサ角度が検出される。磁界角度とセンサ角度との差に応じたオフセット角度が設けられている。ロータの配置には、磁界角度に対応する定常ステータ磁界または回転ステータ磁界の発生が含まれる。さらに本発明は、本発明による方法を実施する角度検出装置に関する。  (もっと読む)
(もっと読む)
電動機制御装置及びパワーステアリング装置
【課題】 部品点数を抑制することができる電動機制御装置、パワーステアリング装置を提供すること。
【解決手段】 ブラシレスモータのトルク目標値と回転軸の回転軸速度とからブラシレスモータを制御する電流目標値を演算し、電流目標値と電源の電流値との差に基づいて、ブラシレスモータを駆動する電圧目標値を演算するようにした。
(もっと読む)
電動機制御方法およびその装置
【課題】電動機のロータ位置を、ロータリーエンコーダなどを用いることなく、電圧、電流の検出値および電動機の機器定数から検出するに当たって、機器定数を同定することにより、ロータ位置検出精度を高める。
【解決手段】誤差削減部19は、圧縮機6のトルク変動量の予め設定された大きさを有しており、振幅調整部15からのトルク変動量出力とこの設定値を比較してLq補正指令を出力する。位置検出部12′は、Lq補正指令に応答してLqを補正し、補正後のLqを用いてロータ位置、角速度を出力する。圧縮機6のトルク変動量は圧縮機6の構造によりほぼ定まるため、圧縮機6の持つトルク変動量と制御が出力するトルク変動の大きさを比較することによってLq補正指令を出力し、位置検出部12′におけるLqの補正を実現する。
(もっと読む)
1 - 20 / 41
[ Back to top ]