
Fターム[5H572EE01]の内容
Fターム[5H572EE01]の下位に属するFターム
パワーセルシンを用いるもの
Fターム[5H572EE01]に分類される特許
1 - 20 / 68
同期制御システム
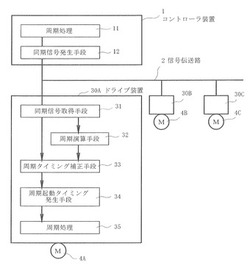
【課題】コントローラ装置の制御周期Tcがドライブ装置の駆動周期Tdの整数倍ではない場合にも同期を確保して設計上の自由度を増大させる。
【解決手段】コントローラ装置1の制御周期よりも駆動周期が短いドライブ装置30Aが、コントローラ装置1からの同期信号に合わせて駆動周期の起動タイミングを調整する周期タイミング補正手段33を備え、調整後の起動タイミングに従って駆動されるシステムにおいて、制御周期が駆動周期の整数倍でない場合に、制御周期に含まれる駆動周期の回数と端数時間とを求め、駆動周期の回数を変えずに1回以上の駆動周期を増加させた時の増加分の合計時間が前記端数時間に一致するように当該駆動周期を演算し、または、駆動周期の回数を増加させて1回以上の駆動周期を減少させた時の減少分の合計時間が元の駆動周期と端数時間との差に一致するように当該駆動周期を演算する周期演算手段32を備える。
(もっと読む)
モータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせ

【課題】2以上のモータが強制的に同期させられる場合において、各モータへの供給電流のアンバランスを抑制可能なモータ制御システム、制御装置、並びにモータ内蔵ローラと制御装置の組み合わせを提供することである。
【解決手段】モータ制御システム1は、モータ内蔵ローラ2と、コントローラ(制御装置)6,7の組み合わせからなるものである。モータ内蔵ローラ2は、ローラ本体3とモータ4,5を有している。モータ4,5は、出力軸同士がローラ本体3で一体的に連結されており、モータ4,5は、強制的に同期運転するものである。モータ4,5の回転数に応じてコントローラ6,7から供給する電流パルスに下限が設定されている。
(もっと読む)
巻線型誘導機
【課題】 従来の巻線型誘導機は負荷の変動及び電源電圧の変動によって回転速度が変化してしまう。このため従来の誘導機は回転数一定または電源周波数と同期させて使いたい機器には不向きであるという問題点があった。
【解決手段】 巻線型誘導機ユニット2台の回転軸を共通にするか又は回転軸の回転比が一定になるように機械的に連結し、前記誘導機ユニット2台の回転子巻線を電気的に結合することにより、前記誘導機ユニット2台のうち1台は電動機として動作、もう1台の誘導機ユニットは発電機として動作し、前記回転比と前記誘導機ユニット2台の極数で決定される前記誘導機ユニット2台のすべり周波数が一致する速度で回転速度が固定されることを特徴とする巻線型誘導機である
(もっと読む)
同期制御装置と同期制御方法
【課題】
複数の駆動系を同期制御する汎用性のある手法を提供する。
【構成】
複数の駆動系を目標指令に従って動作させるため、第1の駆動系に対し第1の操作量を発生させ、第2の駆動系に対し第2の操作量を発生させる。第1の駆動系での目標指令からの誤差と、第2の駆動系での目標指令からの誤差との偏差に比例する同期制御用の操作量を発生させ、第1の操作量に同期制御用の操作量を加算し、第1の駆動系を制御する。また第2の操作量に同期制御用の操作量を加算し、第2の駆動系を制御する。
(もっと読む)
モータ制御システム
【課題】1つの外部位置検出器からの位置情報により、複数のモータ動作を制御可能とするモータ制御システムを提供する。
【解決手段】モータ駆動装置A12aは、外部位置検出器19aから位置情報を取り込む外部位置検出器接続手段16aと、取り込んだ位置情報を他のモータ駆動装置12に送信し、位置指令を前期上位制御装置11から受信するシリアル通信手段13aと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18aを備え、モータ駆動装置B12bは、前記モータ駆動装置A12aから送信された位置情報を受信し、さらに位置指令を前期上位制御装置11から受信するシリアル通信手段13bと、前記位置指令と前記位置情報との差が無くなるようにモータ動作を制御するモータ制御手段18bを備え、1つの外部位置検出器からの位置情報により、複数のモータ動作を制御する。
(もっと読む)
モータ制御システム
【課題】システム同期信号の伝送の信頼性を向上しながら、複数のモータ部の制御に求められるリアルタイム性を確保することが可能なモータ制御システムを提供する。
【解決手段】このモータ制御システム100は、システム同期信号と指令信号とを生成するコントローラ部1と、コントローラ部1から出力されたシステム同期信号を受信した後、指令信号に基づいて動作するとともに、応答信号を出力するモータ部2とを備え、システム同期信号は、スペクトラム拡散方式に基づいて通信されるように構成されているとともに、指令信号と応答信号とは、直交周波数分割多重方式に基づいて通信されるように構成されている。
(もっと読む)
制御装置
【課題】モータの動作に精度が要求されるときに、インバータのPWM方式の切り替えに伴い発生するモータのトルク変動の影響を回避でき、モータの動作に精度が要求されないときに、PWM方式の切り替えによる効果を得ることができる制御装置を得ること。
【解決手段】制御装置は、複数のPWM方式のうちインバータのPWM動作に用いるためのPWM方式の切り替えを行う切り替え部と、動作指令信号により第1の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを不許可とし、前記動作指令信号により第2の動作が指令されたと判断した場合、前記切り替え部によるPWM方式の切り替えを許可する指令判断部とを備え、前記切り替え部は、前記指令判断部により切り替えが不許可とされた場合、PWM方式の切り替えを行わず、前記指令判断部により切り替えが許可された場合、PWM方式の切り替えを行う。
(もっと読む)
電動動作装置及びそれを用いた作業機械
【課題】シンプルで部品点数も少ない構成で自動的にバランスを修正できる信頼性の高い電動動作装置及びそれを用いた作業機械を提供することにある。
【解決手段】第一の電動アクチュエータ1は、ロータ位置センサSを有する電気モータM1を備え、第二の電動アクチュエータ2は、ロータ位置センサを有さない電気モータM2を備える。第一の電動アクチュエータ1と第二の電動アクチュエータ2の出力は、不等長リンク3により合成される。電気モータM1は、その運転条件で最大のトルクを発生するロータと磁界の位置関係にあり、電気モータM2は、その運転条件で最大のトルクを発生するロータと磁界の位置関係から外れて最大のトルクから減少したトルクを発生するような運転状態となる。
(もっと読む)
電動機駆動システム
【課題】同一軸を2個以上の永久磁石式同期電動機で駆動する場合に、全体のシステム構成を簡素化し、且つ固定子及び回転子の性能を最大限に引き出す。
【解決手段】励磁コイルを巻装した固定子12と、永久磁石を有する回転子13とを有する複数の永久磁石式同期電動機1A,1Bで同一回転軸4を駆動する電動機駆動システムであって、各永久磁石式同期電動機1A,1Bのそれぞれの前記励磁コイルの相の位置ずれを逆起電圧の低下を抑制する所定電気角度範囲内とし、且つ各永久磁石式同期電動機1A,1Bのそれぞれの前記回転子12の磁極の位置ずれを前記所定電気角度範囲内として1台のインバータで各永久磁石式同期電動機1A,1Bを駆動する。
(もっと読む)
モータ制御装置
【課題】機械的な規制手段により停止されるモータを含む複数のモータを同期制御する。
【解決手段】モータ制御装置10は、単位動作量が各モータに共通するように各モータの実動作量情報が変換された基準動作量情報に基づいて各モータを同期させて駆動制御を行う制御部9と、複数のモータのうちの1つである第1モータ1が規制手段により規制端点で停止した際の基準動作量情報を停止位置情報として取得する停止位置情報取得部6と、規制端点の理論的な位置である基準停止位置を基準動作量情報に換算した基準停止位置情報と停止位置情報とに基づいて、理論的に基準停止位置において動作するモータの少なくとも1つを基準モータとして補正パラメータを演算する補正パラメータ演算部7と、補正パラメータに基づいて少なくとも第1モータ1を含むモータの基準動作量情報を補正する補正部8とを備える。
(もっと読む)
画像形成装置
【課題】回転多面鏡における回転速度の微調整幅の高分解能化と、回路の規模の簡略化とを両立させる。
【解決手段】回転状態検知手段は、回転多面鏡の回転状態を検知し、回転状態を示す回転状態信号を出力する。第1クロック生成手段は、第1クロックを生成する。回転基準信号生成手段は、第1クロックにしたがって順序回路動作を行い、回転多面鏡の回転基準となる回転基準信号を生成する。第2クロック生成手段は、回転基準信号の周期よりも短く、かつ、第1クロックの周期よりも長い周期の第2クロックを生成する。受信手段は、第2クロックにしたがって順序回路動作を行い、回転基準信号を受信する。位相差測定手段は、第2クロックにしたがって回転状態信号と回転基準信号との位相差を測定する。制御手段は、位相差に基づいて駆動手段に加速信号または減速信号を供給する。
(もっと読む)
独立車輪駆動電動車の制御装置
【課題】駆動輪を駆動する永久磁石式同期電動機の永久磁石が減磁している場合にも、左右車輪トルクのアンバランスを適切に是正して安定した駆動を行うことができるようにする。
【解決手段】電流指令値演算部11の機能構成として減磁判定ブロック22と減磁時の電流指令値演算ブロック25とを設け、第1のモータ1の磁石磁束推定値ψa1と第2のモータ2の磁石磁束推定値ψa2とに基づいて、減磁判定ブロック22にて第1のモータ1と第2のモータ2のいずれかが減磁状態となっているか否かを判定する。そして、いずれかのモータが減磁状態となっていれば、減磁時の電流指令値演算ブロック25において、減磁状態となっているモータで実現可能なトルク範囲内で各モータの出力トルクが一致するように、各モータ1,2に対する電流指令値を各々算出する。
(もっと読む)
モータ駆動装置及び光学制御装置
【課題】高速駆動が可能で、かつ、複数のモータ駆動時における精度劣化を抑制するモータ駆動装置を提供する。
【解決手段】モータ駆動装置は、第1コイルへの通電の切り替えによって回転する第1ロータを備えた第1モータ108と、第1モータ108を駆動する第1ドライバ107と、第2コイルへの通電の切り替えによって回転する第2ロータを備えた第2モータ111と、所定の時間間隔に従って第2モータ111の第2コイルへの通電を切り替える第2ドライバ109と、位置センサ112の出力に応じて第2モータ111の第2コイルへの通電を切り替える第3ドライバ110と、第1モータ108を駆動するとともに第2モータ111を駆動する際には、第3ドライバ110ではなく第2ドライバ109で第2モータ111を駆動するように制御する制御回路105とを有する。
(もっと読む)
モータ同期制御装置
【課題】各軸の制御入力が制限を受けた場合であっても、高精度に各軸の同期を維持することを可能とするモータ同期制御装置を得ること。
【解決手段】2軸以上のモータを個別に駆動する2以上のモータ駆動制御装置のそれぞれが生成する、各軸に共通の位置指令と自軸モータで検出された位置検出値との差分である自軸モータの位置偏差を補正する位置補正量を入力とし、前記2以上の位置補正量のうち最も応答の遅い位置補正量を同期後位置補正量として選択する整形量同期部4aを備え、前記2以上のモータ駆動制御装置のそれぞれは、自軸の前記位置偏差から前記同期後位置補正量を減算した修正位置偏差を用いて自軸モータへの制御入力を計算することを特徴とする。
(もっと読む)
輪転印刷機および輪転印刷機の停電制御方法
【課題】装置構成をコンパクトにすると共に装置コストを抑制し、ウェブを好適に搬送停止させることが可能な輪転印刷機等を提供する。
【解決手段】複数の駆動モータ20,28,30,38,40,45の回転に連動する複数の印刷胴をそれぞれ回転させて、ウェブWを搬送しながら印刷を行う印刷装置Uと、印刷装置UによるウェブWの搬送速度を制御可能な制御装置25,29,35,39,43,47,50,51と、を備えた輪転印刷機10において、制御装置は、速度レートを出力可能な通信部Pと、出力された速度レートに基づいて各駆動モータを制御可能な複数のモータドライバ25,29,35,39,43,47と、を有し、通信部Pは、停電発生直後において停電用減速レートA2を出力し、停電中における各駆動モータの回生動作の開始後において停電用減速レートA2に比して小さい減速率となる停電用補正減速レートA3を出力する。
(もっと読む)
モータ制御システムおよびその接続判定方法
【課題】2台のサーボアンプを通信ケーブルで接続するだけでマスター、スレーブの設定ができ、簡便に同期制御がおこなえるモータ制御システムを提供する。
【解決手段】サーボアンプ1(2)は、双方向通信手段17(28)の一方に駆動するサーボモータ3(4)のエンコーダ通信ケーブル5(6)が接続され、他方の双方向通信手段18と双方向通信手段27を通信ケーブ7で接続しており、装置コントロール部11(21)は、通信開始時のみ、出力するセレクタ切替信号11e(21e)によってセレクタ16(26)で双方向通信手段17,18(27、28)と信号レベル制御部14または信号レベル検出部15とを接続し、同期制御におけるマスター、スレーブを自動判定する。
(もっと読む)
リニアアクチュエータの同期制御装置と方法
【課題】4本以上のリニアアクチュエータにより剛体の3次元位置を制御することができ、各リニアアクチュエータに過負荷検出手段を取り付けることなく、作動時及び静止時の両方において、各リニアアクチュエータの過負荷を防止できるリニアアクチュエータの同期制御装置と方法を提供する。
【解決手段】単一の剛体1に同一直線上に位置しない3点b,c,dで連結されかつ互いに平行な駆動軸B,C,Dを有し、駆動軸の軸方向位置を制御し推力Fb,Fc,Fdを検出可能な3本の位置制御リニアアクチュエータ10と、剛体1に連結されかつ駆動軸B,C,Dと平行な推力軸Aを有し、推力軸Aの軸方向推力Faを制御可能な1本以上の推力制御リニアアクチュエータ20と、3本の位置制御リニアアクチュエータ10の推力Fb,Fc,Fdから推力制御リニアアクチュエータ20の推力を設定する推力設定装置30とを備える。位置制御リニアアクチュエータ10と推力制御リニアアクチュエータ20により剛体1の3次元位置を制御する。
(もっと読む)
モータ制御装置、モータ制御方法および印刷装置
【課題】予定された生涯印刷枚数分の印刷を行う前に動作不能になることがあった。
【解決手段】異なる被駆動体を駆動させる複数のモータにそれぞれ供給される電流値を取得する電流値取得部と、上記複数のモータの運転期間の少なくとも一部を重ならせた状態で当該複数のモータを運転させた場合に当該複数のモータに同時期に供給される電流値の和を、上記電流値取得部によって取得された電流値に基づいて算出し、当該算出した和が所定のしきい値を超えるか否か判定する判定部と、上記判定部によって上記和が上記しきい値を超えると判定された場合に、上記複数のモータの運転期間が重なる時期が減るように上記複数のモータの運転を制御する運転制御部とを備える構成とした。
(もっと読む)
同期制御装置
【課題】高周波のノイズ成分を増大させることなく主状態量のフィードバック値に含まれる位相の遅れ分をキャンセルするように位相を進め,現在の正確な主状態量が得られなくても,従制御対象の状態量を振動や遅れなく精度良く主制御対象の状態量に追従できる同期制御装置を提供する。
【解決手段】 主状態量が主状態量指令に一致するように主操作量を生成する主制御器と,前記主状態量と前記従状態量が同期するように従状態量指令を生成する従状態量指令生成器と,従状態量が従状態量指令に一致するように従操作量を生成する従制御器と,を備えた同期制御装置において,従状態量指令生成器は,主操作量と前記主状態量に基づいて主状態量よりも位相の進んだ位相進み主状態量を生成する位相進み補償演算器(11)と,位相進み主状態量を前記従状態量指令に変換する指令変換器(15)とを備えた
(もっと読む)
ステッピングモータの駆動方法、そのような駆動方法を用いたステッピングモータの駆動装置、及びそのような方法により駆動されるステッピングモータを備えた冷凍サイクル
【課題】複数のステッピングモータを同時に駆動する方法により駆動されるステッピングモータを備えた冷凍サイクルを提供する。
【解決手段】本発明に係る冷凍サイクル10は、冷媒の流量を調節する2個の流量調節弁11A,11Bを駆動する2個のステッピングモータ12A,12bと、各ステッピングモータの駆動を制御する制御部13と、を備えており、各ステッピングモータが有する相の数pが同じであり、ステッピングモータの数がn、制御部13が出力する駆動信号の1パルスの長さがs、制御部13が同時に出力する駆動信号の数がmであり、n及びmは関係式m=n+1を満足し、制御部13が出力する駆動信号の周期tが関係式t=n×p×sを満足し、制御部13は、連続したm個のパルスからなる駆動信号を、ステッピングモータそれぞれに対して、各ステッピングモータが有する相に順番に出力し、且つステッピングモータそれぞれにおける隣り合う相を、1パルスだけ同時に励磁する。
(もっと読む)
1 - 20 / 68
[ Back to top ]