
Fターム[5H572HA04]の内容
複数電動機の制御 (8,234) | 駆動制御回路又は電力変換回路の主要な構成素子 (356) | スイッチ (19)
Fターム[5H572HA04]に分類される特許
1 - 19 / 19
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
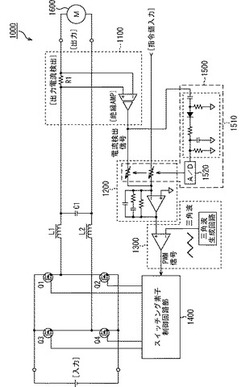
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
モーター停止用の制御装置

【課題】複数のモーターが使用されているプロセスラインにおいて、連続材の破断を防止し、緊急時に、ラインの停止を早期に実現することができるモーター停止用の制御装置を提供する。
【解決手段】本制御装置は、ペイオフリール及びテンションリールの各コイル径情報と各モーターの回転数情報とが入力される入力部17と、各モーターの定格と各機械部の慣性モーメントとが予め記録された記録部18とを備える。停止時間演算部19は、各モーターについて、その時点におけるトルクで回生制動を実施した場合の停止時間を演算する。また、トルク制限値演算部20は、最大停止時間に合わせて停止させるためのトルク制限値を、各モーターについて演算する。そして、非常停止指令が入力されると、出力部21は、上記各トルク制限値を出力し、そのトルク制限値でトルク制限した回生制動を行わせる。
(もっと読む)
プリンタの制御装置
【課題】複数のモータが駆動源として存在する駆動制御系において、コギングトルクリップルの影響を抑制し、速度変動等の影響を受け難いプリンタの制御装置を提供することを目的とする。
【解決手段】第1のモータ、第2のモータのそれぞれのコギングトルクリップルを抑制する補正値を加算した第1のフィードフォワード制御系と第2のフィードフォワード制御系とを設け、フィードバック制御系と上記第1のフィードフォワード制御系と上記第2のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と第1のフィードフォワード制御系との組み合わせと、上記フィードバック制御系と上記第2のフィードフォワード制御系との組み合わせとのいずれかを選択する。
(もっと読む)
モータ駆動システム
【課題】低コストにて、平滑コンデンサに耐圧以上の電圧が印加されるのを抑制する。
【解決手段】整流部32aは交流の電圧を整流し、平滑コンデンサ32cはこの電圧を平滑する。圧縮機用インバータ34は、平滑コンデンサ32cの出力側に接続されており、平滑された電圧を用いて圧縮機用駆動電圧を生成して圧縮機用モータM12に出力する。室外ファン用インバータ35aは、平滑コンデンサ32cの出力側において圧縮機用インバータ34に並列に接続されている。室外ファン用インバータ35aは、平滑された電圧を用いてファン用駆動電圧を生成して室外ファン用モータM18に出力する。MPU39は、圧縮機12において異常が発生した場合、圧縮機用インバータ34による圧縮機用駆動電圧の出力を停止させつつ、室外ファン用モータM18の負荷を上げるように室外ファン用インバータ35aの制御を行う。
(もっと読む)
車両駆動装置、電動車両、及び車両駆動装置の車両駆動方法
【課題】いずれか1つの駆動軸に係わる異常が発生した場合でも、当該異常発生に係わる軸を別の軸との駆動力のバランスをとりつつ駆動することで、必要最低限のバランスのよい走行を行う。
【解決手段】車両駆動装置1のモータ駆動部150は、モータ10,20に給電するためのサーボ制御部160,170と、異常検出部105と、を備え、モータ駆動部250は、モータ10,20に給電するためのサーボ制御部260,270と、異常検出部105と、を備え、モータ駆動部150の異常検出部105が異常を検出した場合に、サーボ制御部160,170からの給電を停止し;モータ駆動部250の異常検出部105が異常を検出した場合に、サーボ制御部260,270からの給電を停止するように、モータ駆動部150,250からのモータ10,20への給電態様を切り替えるバッファ191,192,193,194を設ける。
(もっと読む)
電動動作装置及びそれを用いた作業機械
【課題】シンプルで部品点数も少ない構成で自動的にバランスを修正できる信頼性の高い電動動作装置及びそれを用いた作業機械を提供することにある。
【解決手段】第一の電動アクチュエータ1は、ロータ位置センサSを有する電気モータM1を備え、第二の電動アクチュエータ2は、ロータ位置センサを有さない電気モータM2を備える。第一の電動アクチュエータ1と第二の電動アクチュエータ2の出力は、不等長リンク3により合成される。電気モータM1は、その運転条件で最大のトルクを発生するロータと磁界の位置関係にあり、電気モータM2は、その運転条件で最大のトルクを発生するロータと磁界の位置関係から外れて最大のトルクから減少したトルクを発生するような運転状態となる。
(もっと読む)
モータ制御装置、及び、モータ制御方法
【課題】1つのフルブリッジ型MERSで、複数のモータをソフトスタートさせて定格運転に移行させるモータ制御装置、及び、モータ制御方法を提供する。
【解決手段】モータ制御装置10は、フルブリッジ型MERS100と、線路150と、制御回路200と、複数の接続スイッチSWMiから構成され、交流電源VSと複数のモータMiの間に接続される。接続スイッチSWMiはそれぞれモータMiとフルブリッジ型MERS100と線路150に接続される。制御回路200は、フルブリッジ型MERS100を構成する4つの逆導通型半導体スイッチSW1乃至SW4と、接続スイッチSWMiを切り替えることによって、モータMiを1つずつソフトスタートさせて定格運転に移行させる。
(もっと読む)
電源接続方法
【課題】 ステージを移動させる複数のモータのそれぞれに電力を供給する複数の下流電源に接続する上流電源の数を減少させることができる電源供給方法を提供する。
【解決手段】 ベースに対してステージを移動させる複数のモータ12a〜12hのそれぞれに接続される複数の下流電源10a〜10hの電源接続方法であって、少なくとも2つの上流電源4,6の中の1の上流電源4の下流電源10a〜10dに対して供給する最大電力が、上流電源4に接続される下流電源10a〜10dのモータ12a〜12dに対して供給する最大電力の和より小さく、かつ下流電源10a〜10dの各時間におけるモータ12a〜12dに対して供給する電力の和が、上流電源4の下流電源10a〜10dに対して供給する最大電力を超えないように、上流電源4に接続する下流電源10a〜10dを選択し、選択された下流電源10a〜10dを上流電源4に接続する。
(もっと読む)
サーボドライバ
【課題】従来のサーボドライバは、第1及び第2回生抵抗の一方のみで回生電力が消費されて、第1及び第2回生抵抗の他方が使用されない状態が発生するので、部品使用効率が悪くなっている。
【解決手段】本発明によるサーボドライバでは、Pバスライン301とNバスライン302との間に、回生抵抗400とスイッチ回路401とが互いに直列に設けられている。第1及び第2電圧検出回路106,206は、第1及び第2電圧109,209が所定電圧値を超えた場合に、スイッチ回路401を閉成して、回生電力108a,208aを共通の回生抵抗400で消費させる。
(もっと読む)
モータ駆動装置
【課題】半導体スイッチ素子が故障した側のモータをV結線にし、直流入力端子電圧を昇圧しながら継続運転を可能にする。
【解決手段】電力変換器105,106、交流モータ102,103、直流電源100、入力側中性点スイッチ104a,104b、モータ中性点スイッチ101a,101b、制御装置111を備え、この制御装置111は、故障素子判定部207と、故障相の出力端子と直流入力端子の中性点とを接続するべくスイッチ104a,104bを動作させるスイッチ駆動部208と、故障素子を含む電力変換器に接続されたモータの中性点と電源100とを切り離すべくスイッチ101a,101bを動作させるスイッチ駆動部209と、V結線されたモータを駆動するために、故障素子を含む電力変換器に対する駆動信号を生成する信号切替制御部205、PWMパルス生成部206等を備える。
(もっと読む)
多軸ロボット用電源回路およびその電源回路の遮断方法
【課題】簡潔な配線で安価で信号伝達の遅れを考慮する必要がなく、信号線の断線ですべてのモータ電源をオフにする多軸ロボット用電源回路を提供する。
【解決手段】 モータ電源遮断回路を駆動する安全ユニット10において、第1入力回路11に入力信号があるとき正常とする出力信号をCPU12と論理回路13に入力し、CPU12は入力信号が入ると出力信号を論理回路13とモータ電源遮断回路19に入力し、論理回路13は2入力で1出力を第1出力回路14に入力し、第2入力回路16に入力信号があるとき正常とする出力信号をCPU12と第2出力回路17に入力し、第1入力回路11または第2入力回路16に入力が断たれると出力を出さなくなることにより、CPU12がモータ電源遮断回路19を遮断動作させる。
(もっと読む)
車両用パワーシートの姿勢操作機構と姿勢操作方法
【課題】制御装置などを含む複雑な回路を使用せずとも簡単なアナログ回路によってパワーシートの操作方向および操作速度を変更できる車両用パワーシートの姿勢操作機構と姿勢操作方法を提供する。
【解決手段】姿勢操作機構20は、出力ギア21に回転出力を伝達する第1のモータ22と、出力ギア21に第1のモータ22よりも大きな減速比で回転出力を伝達する第2のモータ23と、第1・第2のモータ22・23へ通電操作するスイッチ4とを有する。スイッチ4は、2つの方向へ操作可能で、かつそれぞれの方向において2段階の操作量で操作可能である。スイッチ4の操作量、操作方向に応じて第1のモータ22と第2のモータ23との通電対象、および回転方向が切り替えられる。第1・第2のモータ22・23とスイッチ4とは、第1・第2のモータ22・23へダイレクトに通電可能なアナログ回路26によって接続されている。
(もっと読む)
サーボモータシステム
【課題】サーボモータ12等に故障が生じていない場合に容易に復帰させる。
【解決手段】起動時にエアミックスドア6の位置が上限位置よりも上側に位置するときには、ステップS100でYESと判定する。また、ステップS110において、エアミックスドア6の位置が下限位置よりも下側に位置するときにはYESと判定する。ステップS100、S110のいずれかでYESと判定したときには、エアミックスドア6の位置が異常であると判定することになる。このとき、ステップS120に移行して、サーボモータ12を駆動して、エアミックスドア6の位置をポテンショメータ12aの位置検出可能範囲内に戻して、通常制御を実施する。このため、起動前の通常制御でサーボモータ12が故障してないにもかかわらず、ステップS100、S110のいずれかでYESと判定したときでも、その後の起動時に、復帰できる。
(もっと読む)
非常油ポンプのポンプ駆動機構及び駆動ポンプ切換方法
【課題】容易に入手可能な機器を使用して、非常油ポンプを滑らかに起動することができる非常油ポンプのポンプ駆動機構を提供する。
【解決手段】停電時に非常電源50を用いて回転機械に潤滑油を供給する非常油ポンプのポンプ駆動機構において、非常油ポンプの非常電動機23aが非常電源50からインバータを介して給電を受ける交流電動機とされ、インバータとしてEOP常用インバータ31及び予備インバータ35が設けられている。
(もっと読む)
電気車制御装置
【課題】回路数を削減し装置の小型化と低コスト化を可能にした電気車制御装置を提供する。
【解決手段】電気車用電動機を駆動する複数台のVVVFインバータ59,60と、各VVVFインバータ59,60に個別に設けられるDC/DCコンバータ57,58と、各DC/DCコンバータ57,58の出力に個別に接続されたリアクトル55,56を介して接続された蓄電装置50とを備え、蓄電装置50は、複数台のVVVFインバータ59,60で共通に使用されて、電気車用電動機の回生エネルギーを吸収する。
(もっと読む)
モータ駆動方法及び装置
【課題】本発明は、1個のみのモータドライバで複数のモータを駆動させることを目的とする。
【解決手段】本発明によるモータ駆動方法及び装置は、1個のみのモータドライバ(10)にスイッチング回路部(11)を介して複数のモータ(12,13)を接続し、前記スイッチング回路部(11)の操作により、複数のモータ(12,13)の同時駆動又は一方のみ駆動を行う方法と構成である。
(もっと読む)
制御回路装置
【課題】設置自由度を低下させることなく低電位接続線のオープン故障時の電流の回り込みを防止して信頼性を向上できる駆動回路装置を提供する。
【解決手段】パワー部2と、プラス側電源線8aとマイナス側電源線9aと、パワー部3と、プラス側電源線8bと、マイナス側電源線9bと、第1制御部10aと、第2制御部10bと、接続線L3と接続線L4と、接続線L1と、接続線L2と、前記第1駆動部から、前記プラス側電源線8a、前記接続線L3、前記接続線L4、前記接続線L1及び前記接続線L2を介してマイナス側電源線9bへ電流が流れるのを阻止するフォトカプラ11a,11bとを設けたことを特徴とする。
(もっと読む)
電動モータ用電子制御装置
【課題】 電源端子T1、T2に流れる電流を少なくする。
【解決手段】 電子制御装置6は、車載バッテリBaに接続される電源端子T1、T2を通して車載バッテリBaからの電力をサーボモータ10A、10B、10Cに供給して、かつサーボモータ10A、10B、10Cをそれぞれ制御するものであって、電源端子T1、T2に流れる電流値を検出する電流検出回路6eを備えており、マイクロコンピュータ6bは、電流検出回路6eにより検出される電流に基づいて、サーボモータ10A、10B、10Cのそれぞれについて異常電流が流入しているか判定して(ステップS23、S29、S31)、異常電流が流入していると判定されるサーボモータに対する制御を停止する。
(もっと読む)
電力ネットワーク
電力ネットワーク(1)内の伝送ネットワーク(3)のグリッドポイント(4)に接続線(5)を介して接続されている装置(2)の故障状態を制御するためのデバイスを提供する。  (もっと読む)
(もっと読む)
1 - 19 / 19
[ Back to top ]