
Fターム[5H580HH08]の内容
ステッピングモータの制御 (5,935) | 検出変量又は検出手段 (732) | 位置又は速度の検出 (279) | 光学式検出手段 (30)
Fターム[5H580HH08]に分類される特許
1 - 20 / 30
後処理装置
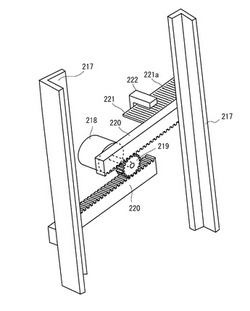
【課題】トルクを下げることなく、物理的な要素以上の分解性能でカーソル位置を制御することができる後処理装置を提供する。
【解決手段】1パルス移動距離よりも高い分解能でカーソル217の停止位置を検出し、カーソル217の停止位置から、整合位置までの必要移動距離、ステッピングモーター218によってカーソル217を移動させるために必要なパルス数を算出し、必要移動距離が1パルス移動距離の整数倍か否かを判断し、必要移動距離が1パルス移動距離の整数倍でないと判断した場合には、ステッピングモーター218の励磁制御を変えて、カーソル217を1パルス移動距離よりも短いステップで移動させて、再度パルス数を算出し、必要移動距離が1パルス移動距離の整数倍であると判断した場合には、算出したパルス数をステッピングモーター217に印加して整合位置までカーソルを移動させる。
(もっと読む)
印刷装置

【課題】パルスモータの脱調を確実に防止し円滑な駆動を行う。
【解決手段】複数のパルス指令を出力するモータ駆動回路73と、上記複数のパルス指令に追従して回転するシート送りモータ72と、無定長ロールシート3A等を搬送するためのプラテンローラ26と、印字データに基づく所望の印字を形成するサーマルヘッド31と、印字周期Tに対応してライン印刷データごとに通電態様を切り替える通電制御を行うサーマルヘッド駆動回路71とを有し、複数のパルス指令の出力態様を変化させシート送りモータ72の回転速度を制御し、シート送りモータ72の回転における複数のパルス指令への追従性が乱れる脱調現象が生じているか否かを判定し、脱調現象が生じている場合に、第1目標速度V1の値を脱調現象が生じなくなるように増減修正し新たな第2目標速度V2とする。
(もっと読む)
可動体駆動装置
【課題】遊技機に設けられた可動体を駆動するための、上位の制御装置の負荷を軽減可能な可動体駆動装置を提供する。
【解決手段】可動体駆動装置1は、遊技機に設けられた可動体の移動目的地を規定する制御コマンドを受信する通信部2と、可動体の現在位置を記憶する記憶部63と、その可動体の移動目的地と現在位置との差、またはその可動体の直前の動作における移動方向に基づいて、可動体の次の動作における移動方向を決定し、次の動作における移動方向に沿って可動体が移動目的地に達するまで可動体を移動させるように、可動を駆動する駆動ユニットを制御する制御部(61、62、7)とを有する。
(もっと読む)
モータ制御装置および光学機器
【課題】低コストでモータ振動に対する最適な補正制御が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、可動部を移動させる駆動手段と、駆動手段に駆動信号を与えて駆動手段を制御する制御手段と、可動部の基準位置を検出するために用いられる基準位置情報および可動部の振動状態を検出するために用いられる振動状態情報を出力する検出手段とを有し、制御手段は、基準位置情報に基づいて可動部の基準位置を設定し、振動状態情報に基づいて可動部の振動量が低減するように駆動信号を補正し、可動部の移動量に対して基準位置情報は第1の変化率を有し、振動状態情報は該第1の変化率と異なる第2の変化率を有する。
(もっと読む)
遊技機
【課題】ステッピングモータの脱調を即座に発見して対処可能な遊技機の提供。
【解決手段】パチンコ遊技機1は、装飾可動体42と、装飾可動体の駆動源たる第1ステッピングモータ63及び第2ステッピングモータ67と、両モータ63,67の駆動を制御する駆動制御手段(ランプ制御基板24、駆動回路96、駆動回路104により構成される)と、駆動制御手段から両モータへの通電波形を測定する測定手段(電圧測定部100,108、A/D変換部101,109、ランプ制御基板24により構成される)と、測定手段により測定された通電波形情報に基づいて、両モータの駆動状態を判定する判定手段(ランプ制御基板24により構成される)と、を備え、判定手段によりいずれかのモータが脱調したと判定されたとき、駆動制御手段は、通常の制御パターンから、脱調時の速度以上の速度で両モータを駆動させない特別の制御パターンに切り換えて両モータを駆動する。
(もっと読む)
駆動装置
【課題】検出器や制御部において発生する遅れを反映させたすべり補正を行うことができる駆動装置を提供する。
【解決手段】制御部18は、被駆動体12が検出器16を通過する通過時点t0における被駆動体12の位置θDと、通過時点t0から検出器16が検出信号を出力する出力時点までの検出遅れ期間Δtdにおける被駆動体12の移動距離である第一距離Δθdと出力時点から制御部18が検出信号を取得する取得時点t1までの取得遅れ期間Δtrにおける被駆動体の移動距離である第二距離Δθrとの少なくとも一方の距離と、を用いて取得時点t1における被駆動体12の実際の位置を求める。さらに、被駆動体12の駆動開始時点から取得時点t1までにモータ14に出力した駆動信号によって定まる取得時点t1における被駆動体12の理論上の位置を求め、実際の位置と理論上の位置との差に基づいて取得時点t1以降の駆動信号を定める。
(もっと読む)
遊技機
【課題】可動役物5を駆動させるステッピングモータ155を停止させる際にステッピングモータ155に過度の負荷がかかるのを防止することができるパチンコ遊技機1を提供すること。
【解決手段】パチンコ遊技機1は、励磁パルス信号をステッピングモータ155へ送信してステッピングモータ155を駆動させる駆動回路154と、励磁パルス信号を監視して、ステッピングモータ155が励磁状態であるか否かを判定し、かつ可動役物が所定の停止位置に到達したことを検知する、CPU151とを備えている。パチンコ遊技機1では、CPU151によって可動役物5が所定の停止位置に到達したことが検知され、かつ、ステッピングモータ155が励磁状態ではないと判定された場合のみ、CPU151が、駆動回路154がステッピングモータ155へ励磁パルス信号を送信することを停止させる。
(もっと読む)
ステッピングモータ駆動装置
【課題】簡単な構成で回転角度ムラを効果的に低減するステッピングモータ駆動装置を提供する。
【解決手段】被駆動体を駆動するステッピングモータ1と、このステッピングモータをマイクロステップ駆動するモータドライバ2と、モータドライバ2を制御する制御部3と、ステッピングモータ1の2相励磁駆動における少なくとも1つのステップを基準ステップとして、この基準ステップ毎に予め定められたタイミングパルスの出力時間間隔のパターンを表わす出力時間間隔データを記憶する記憶部4とを備える。制御部3のタイミングパルス出力部は、記憶部4に記憶された出力時間間隔データに基づいて、タイミングパルスを基準ステップ単位で繰り返しモータドライバ2に出力する。
(もっと読む)
回転制御装置、画像形成装置及びプログラム
【課題】加速回転中の回転式現像装置を予め定められた停止位置に停止させる回転制御装置、画像形成装置及びプログラムを提供する。
【解決手段】回転式現像装置を待機位置から現像位置まで回転させる場合、パルスカウント値及びプロファイルに格納されているパルス数に基づいて回転式現像装置を回転させるようにスッテピングモータを制御し、基準位置検知信号が入力されたときに、基準位置検知信号に対応する停止位置としてのホームポジションに回転式現像装置が停止するようにプロファイルのアドレス30に格納されているステップ数を調整するように制御する。
(もっと読む)
アナログメータ装置
【課題】 複数の環境データを表示する装置として合理的に構成されたアナログメータ装置を提供すること。
【解決手段】 温度や湿度等の環境データを検出するセンサと、文字板400と、ムーブメント500と、センサが検出した環境データに応じてムーブメントを制御する制御手段600とを備えたアナログメータ装置において、センサとしては、異なる環境データをそれぞれ検出する第1センサ210及び第2センサ220を備え、指針としては、第1指針310及び第2指針320を備え、ムーブメントは、第1指針を駆動する第1駆動系510と、第2指針を駆動する第2駆動系520と、第1駆動系及び第2駆動系を保持するケース体530とを備え、各センサが検出した環境データに応じて各指針をそれぞれ回転駆動するようにし、制御手段は、所要の回路を設けた回路基板であり、ケース体に装着されており、各センサは、回路基板に搭載されている構成とした。
(もっと読む)
アナログメータ装置
【課題】 複数の環境データを表示する装置として合理的に構成されたアナログメータ装置を提供すること。
【解決手段】 異なる環境データをそれぞれ検出する第1センサ210及び第2センサ220と、回転の中心軸が共通の第1指針310及び第2指針320とを備え、第1センサが検出した環境データに応じて第1指針を回転駆動するとともに、第2センサが検出した環境データに応じて第2指針を回転駆動するようにし、第1指針及び第2指針は、第1指針パイプ513及び第2指針パイプ523にそれぞれ支持して設け、第1駆動系510及び第2駆動系520の要所には、発光素子541の光を透過する透光部543をそれぞれ設け、位置検出手段540による位置検出時には、発光素子を点灯しつつ第1駆動系及び第2駆動系をそれぞれ駆動し、第1指針パイプ及び第2指針パイプの位置は、その際の受光素子542の検出パターンから特定するようにした。
(もっと読む)
アナログメータ装置
【課題】 複数の環境データを表示する装置として合理的に構成されたアナログメータ装置を提供すること。
【解決手段】 温度や湿度等の環境データを検出するセンサと、指針が配置された文字板400と、指針を回転駆動するムーブメント500と、センサが検出した環境データに応じてムーブメントを制御する制御手段600とを備えたアナログメータ装置において、センサとしては、異なる環境データをそれぞれ検出する第1センサ210及び第2センサ220を備え、指針としては、回転の中心軸が共通の第1指針310及び第2指針320を備え、ムーブメントは、第1指針を駆動する第1駆動系510と、第2指針を駆動する第2駆動系520と、第1駆動系及び第2駆動系を保持するケース体530とを備え、第1センサが検出した環境データに応じて第1指針を回転駆動するとともに、第2センサが検出した環境データに応じて第2指針を回転駆動するようにした。
(もっと読む)
モータ駆動装置および電子時計
【課題】 最適な駆動パルスがより多く選択されるようにすることで消費電力の削減を図れるモータ駆動装置および電子時計を提供する。
【解決手段】 ステッピングモータを駆動するモータ駆動装置、並びに、該モータ駆動装置により指針を回転させる電子時計である。そして、複数種類のパルスレベルP6〜P4のうち1つのパルスレベルの駆動パルスを出力して非回転の検出がなされたらパルスレベルを1段上げる一方、1つのパルスレベルの駆動パルスで設定回数Nxの回転が遂行されたらパルスレベルを一段下げるパルスレベルの切換え制御を行う(状態St1〜状態St7)。さらに、最適なパルスレベルが選択されていると判断できる条件が満たされた場合に設定回数Nxを増加させる回数変更制御を行う(状態St5→状態St6)。
(もっと読む)
ステッピングモータの回転角検出装置
【課題】 高分解能化及び低コスト化の双方を図るようにする。
【解決手段】 回転角検出装置Aについては、ステッピングモータBの回転角(最小ステップ角:n)をロータリーエンコーダC(角度分解能:m)に比べて高精度で検出する装置であり、ロータリーエンコーダCのエンコーダ信号aをカウントするエンコーダカウンタ10と、ステッピングモータBを動作させるための入力パルス信号bをカウントするとともにエンコーダ信号aが示すタイミングでリセットする入力パルスカウンタ20と、エンコーダカウンタ10のカウント値p及び入力パルスカウンタ20のカウント値qに基づいてステッピングモータBの回転角α(α=p・m+q・n)を演算して位置情報信号fとして出力する構成となっている。
(もっと読む)
撮影装置
【課題】外乱の影響を受けやすい場合や、ステッピングモータを複数の速度領域で駆動する場合であっても、ステッピングモータの異常動作を確実に検出できる撮影装置を提供すること。
【解決手段】ステッピングモータに取り付ける遮光羽に、幅の異なる2種類以上のスリット孔1032aを形成しておく。幅の異なるスリット孔1032aに対応してHとなる期間の異なる2種類以上のPI信号が出力される。このPI信号をカウントすることによって脱調を判定する。
(もっと読む)
回転体駆動制御装置
【課題】低コストかつ、高精度の回転体駆動制御装置を提供する。
【解決手段】回転体と、前記回転体の回転軸に取り付けられた多数のスリットをリング状に配置したコードホイールと、前記コードホイールのスリットが通過する間隔を矩形波状の電気信号に変換するロータリーエンコーダと、前記ロータリーエンコーダの電気信号から前記回転体の角速度を検出する速度検出手段と、前記回転体を回転駆動するモータと、前記速度検出手段による角速度情報から前記モータの回転速度設定を演算する演算手段と、演算された回転速度設定を基にモータ駆動クロックの周期を増減して前記モータの回転速度を可変するモータ制御手段と、前記モータ駆動クロック数をカウントする第一のカウント手段とを備え、前記第一のカウント手段が出力するカウント値を前記回転体の位相情報として扱い、前記回転体の角速度を制御する。
(もっと読む)
電動アクチュエータシステム
【課題】イニシャライズに要する時間を短縮可能とする電動アクチュエータシステムを提供することにある。
【解決手段】回転基準位置が予め定められた回転範囲の間の原点位置に位置合わせされた条件で、回転基準位置を回転範囲の間の所望の位置に制御する位置制御と、回転基準位置が原点位置からズレた時に、電動モータ110を最初に所定方向に回転させて、回転基準位置を原点位置に合わせるイニシャライズ制御とが制御手段120によって実行される電動アクチュエータシステムにおいて、原点位置から、所定方向とは逆方向に予め定められた所定量だけ離れたイニシャライズ準備位置を設け、制御手段120は、イニシャライズ制御を実行する前に、回転基準位置をイニシャライズ準備位置に移動させるイニシャライズ前処理制御を実行する。
(もっと読む)
駆動制御装置、駆動制御方法および光ピックアップ装置
【課題】 小型かつ低価格で球面収差補正時にステッピングモータの脱調を回避することができる駆動制御装置、駆動制御方法および光ピックアップ装置を提供する。
【解決手段】 制御部22は、コリメータレンズ12を原点位置から、所定のパルスレートT1の駆動パルスで所定のクロック数Aだけ駆動して、コリメータレンズ12を移動する。パルスレートT1よりも高いパルスレートT2で、コリメータレンズ12を原点位置に戻し、戻すために要した駆動パルスのクロック数Bを計数する。制御部22は、クロック数Aとクロック数Bとが等しくなくなるまで、パルスレートT2を1段階ずつあげて、計数を繰り返す。制御部22は、クロック数Aとクロック数Bとが等しくないと、脱調があったと判断し、脱調があったと判断したパルスレートT2を1段階下げたパルスレートT2を球面収差補正動作のパルスレートに決定する。
(もっと読む)
ステージ位置決め装置
【課題】
ステージを目標位置に高精度に位置決めを行い、かつ位置決め終了時の残留振動を低減することが可能なステージ位置決め装置を提供する。
【解決手段】
モータ駆動手段からステージの位置を出力するレーザ測長計までを、速度指令入力から位置を出力する一つの制御対象としてみなし、この制御対象に速度指令を入力し、制御対象の周波数特性を取得する。得られた周波数特性から、ステージの固有周波数および除去したい周波数帯域を決定し、速度指令フィルタを設定する。通常時のステージ駆動は、ステージの現在位置と目標位置指令の差分を用いて、制御部により第1の速度指令を算出する。第1の速度指令を速度指令フィルタに通すことで、特定の周波数帯域を除去した第2の速度指令を算出する。この制御対象に第2の速度指令を入力する。
(もっと読む)
プリンタ装置
【課題】 プリンタ装置において、使用電源や筐体のサイズの制約から小型で低消費電力のモータを使用せざるをえないため、給紙動作及び排出動作時には十分に搬送スピードが上げられないという問題があった。
【解決手段】 記録用紙を搬送するモータと、前記記録用紙に記録を行う記録部と、モータのロータ位置を検出する位置検出手段と、決められた時間間隔に従ってモータのコイルの通電状態を切り替え駆動する第1の駆動手段と、位置センサの出力に応じてモータのコイルの通電状態を切り替え駆動する第2の駆動手段と、第1の駆動手段と第2の駆動手段を切り替え可能な切り替え手段と、切り替え手段により切り替えられた駆動手段でモータの駆動を制御する制御手段と、を有し、切り替え手段は、一連の記録動作の中でいずれの動作を行うかに応じて第1の駆動手段と第2の駆動手段を切り替える。
(もっと読む)
1 - 20 / 30
[ Back to top ]