
Fターム[5J070AC04]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 距離 (2,439) | 水平距離 (24)
Fターム[5J070AC04]に分類される特許
21 - 24 / 24
車両の駐車過程用の幾何学的形状データを検出するための方法
車両の駐車過程用の幾何学的形状データを検出するための方法において、車両が駐車スペースに沿って側方を走行する間、複数回に渡り、相前後し、車両と車道縁との間の側方間隔が、車両固定式で配設されている間隔センサを用いて測定される。車両縦軸線と車道縁との間の角度が次の検出により決定される、即ち、駐車スペースに沿った走行時に車両の横運動から得られる、目下の車両縦方向と規定の縦方向との間の横運動角度を検出すること、車道縁の輪郭延在態様から得られる、規定の縦方向と車道縁との間の車道縁角度を検出すること、及び、横運動角度と車道縁角度とを加算することによって目下の車両縦軸線と車道縁との間の角度を検出することである。 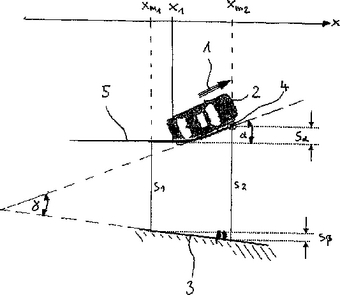 (もっと読む)
(もっと読む)
接近警報装置
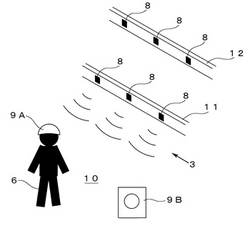
【課題】充電部に最も近い部位における接近距離に基づいて作業者の接近を検知する。接近距離の測定の精度を向上させる。小型化する。
【解決手段】インパルス信号3の送信タイミングとインパルス信号3の反射波の受信タイミングに基づいて作業者6の接近距離dを算出すると共に、接近距離dと記憶手段に予め記憶している接近限界距離dmaxとをインパルス信号3に重畳して送信する接近距離検出手段8と、インパルス信号3を受信し、接近距離dが接近限界距離dmaxよりも短い場合に作動する警報手段9とを備え、接近距離検出手段8は充電部11の磁束変化の影響を受ける位置に設置されており、電磁誘導による誘導電流で作動するものである。
(もっと読む)
FMCW距離測定装置

【課題】アンテナ(空中線)から目標対象物に照射する信号の周波数帯域に制限がある場合でも、近距離測定において精度の高い距離測定を行う。
【解決手段】周波数変調した搬送波信号を信号分配器4により2分割し、一方を送信信号として空中へ放射し目標対象物7から反射させて受信し受信信号を得、他方を参照信号とし、この参照信号の位相を、1回の測定毎に、360度の間で180度の2分の1以下であって、かつ180度の整数分の1の等間隔角度で0度から位相を変化させる位相器9を通した後、混合器8により受信信号と混合して、ビート信号を生成する。信号処理器12において0度を含め位相を変化させた回数分の実数FFT演算結果の平均を求め測定距離の真値とする。
(もっと読む)
物標検出装置
【課題】 割り込み物標を高速に検知することが可能な物標検出装置を提供することを目的とする。
【解決手段】 この物標検出装置は、遠距離狭角検出範囲R1を有する第1レーダ100aと、遠距離狭角検出範囲R1に部分的に重複する近距離広角検出範囲R2を有する第2レーダ100bとを備えている。範囲設定手段としてのレーダ100aは、近距離広角検出範囲R2であって且つ遠距離狭角検出範囲R1でない非重複検出範囲R2a内において、第2レーダ100bの出力のノイズレベルが上昇した場合には、このノイズレベル上昇した検出範囲R2aに隣接する遠距離狭角検出範囲R1内の領域Rxを重点的検出範囲に設定して物標検出を行う。
(もっと読む)
21 - 24 / 24
[ Back to top ]