
Fターム[5J070AE05]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399) | ヘリコプター (10)
Fターム[5J070AE05]に分類される特許
1 - 10 / 10
目標物管理装置および目標物管理方法
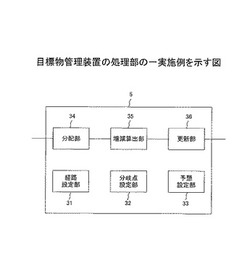
【課題】目標物の誤検出を抑止するとともに、センサの数を抑えて目標物の数を効率よく管理する目標物管理装置および目標物管理方法を提供する。
【解決手段】監視対象範囲に対応する地図情報の2つ以上の座標により表される複数の経路と、経路が接続する点を表す分岐点とを関連付け、センサ各々が探知した1つ以上の目標物の座標を、複数の経路のいずれかに関連付ける分配部と、1回目の走査時に探知した分岐点に関連付けられている経路各々の目標物の数と、2回目の走査時に探知した経路各々の目標物の数とを用いて、経路各々の目標物の数の増減値を算出し、経路各々の目標物の数の増減値から分岐点ごとに、経路各々に関連付けられている目標物の数の増加数または減少数を求める増減算出部と、増加数または減少数を、前回更新部で求めた経路の目標物の数に加えて今回の該経路の目標物の数とする更新部と、を備える目標物管理装置である。
(もっと読む)
レーダ装置

【課題】クロスレンジプロフィールを用いた類別判定において、目標の観測条件(距離、速度、進行方向)によってクロスレンジ分解能が変化することにより、類別判定結果の信頼性が大きく変化するという運用上の課題がある。
【解決手段】追尾情報から得られた目標の観測条件と、所望のクロスレンジ分解能から、所望のクロスレンジ分解能を得るために必要となる目標観測時間を算出し、これに基づき捜索ビーム及び類別ビームのビームスケジューリングを行う。
所望のクロスレンジ分解能を得るために更に長い目標観測時間が必要な場合は、類別ビームを分割送信することによりクロスレンジ分解能を向上させ、目標の観測条件によらずクロスレンジ分解能を一定にすることにより、類別判定結果の信頼性を一定に保つ。
(もっと読む)
ポラリメトリSAR装置及びポラリメトリSARデータを用いる目標物同定方法
【課題】地物の向き及び撮像方向による影響を軽減させながら、撮像された地物を任意の形状のものと定量的に同定する。
【解決手段】提供されるポラリメトリSAR装置は、第1の基底変換処理部19が撮像された地物のフルポラリメトリデータに基づいて第1のフルポラリメトリ複素画像を算出し、第2の基底変換処理部20が既知の地物のフルポラリメトリデータに基づいて第2のフルポラリメトリ複素画像を算出する。強度変換処理部23とフィルタ処理部27を経由した第1のフルポラリメトリ複素画像と、強度変換処理部24とフィルタ処理部28を経由した第2のフルポラリメトリ複素画像は、類似度算出処理部31によって類似度が算出される。類似度算出処理部31は、算出された類似度rの値が所定値より高いときに撮像された地物を既知の地物によって定量的に同定する。
(もっと読む)
電波誘導装置
【課題】移動していない目標に対しても誘導精度を劣化させないで誘導弾を誘導できる電波誘導装置。
【解決手段】目標検出部5は、間欠的に出現する目標用の目標ゲート信号で受信機4からの信号をゲートして周波数分析する第1周波数分析器101−1と、この出力から目標を検出する第1目標検出器102−1と、常に出現する代理目標用の代理目標ゲート信号で受信機からの信号をゲートして周波数分析する第2周波数分析器101−2と、この出力から代理目標を検出する第2目標検出器102−2を備え、追随制御部6は、第1目標検出器によって目標が検出されなかった場合に、目標と代理目標との相対位置関係を計算する相対位置計算器104と、計算された相対位置関係と代理目標の位置情報とに基づき目標の位置を推定し、目標位置の推定値として出力する位置計算器105とを備える。
(もっと読む)
誘導弾
【課題】移動していない目標に対しても誘導精度を劣化させないで誘導できる誘導弾。
【解決手段】アンテナ13からの送信波の反射波を該アンテナで受信する受信機14と、受信した信号に基づき目標を検出して目標信号を出力する目標検出部15と、目標信号に基づき推定した推定位置信号を出力する追随制御部16と、外部から与えられた目標の推定位置情報にしたがって略鉛直方向から目標に接近するように誘導弾を誘導し、誘導弾の機軸が鉛直方向になった後は、追随制御部からの推定位置信号に基づき誘導弾を誘導する誘導制御部17とを備えた電波誘導装置1を搭載した誘導弾であって、追随制御部は、誘導弾の機軸が鉛直方向になった後に、地表までを測距して得られた測距値に基づき目標の捕捉範囲を設定し、目標検出部は、追随制御部で設定された捕捉範囲内で目標を検出して目標信号を出力する。
(もっと読む)
飛翔体誘導システム
【課題】 飛翔体誘導システムが、飛来する敵機をキャッチしてこれを迎撃すべくミサイル等の飛翔体を発射させるとき、飛翔体が種別の異なる敵機に対しても容易かつ適切に対応できるようにする。
【解決手段】 捜索レーダ1が空間を捜索して目標Aを検出し、判定器2がその検出した目標Aの種別を判定する。
捜索レーダ1がキャッチした目標Aに向けて飛翔体6が発射され、飛翔体6が目標Aを検知して追尾するとき、予め判定器2によって判定された目標Aの種別に対応した目標検出プログラム(A1,A2,・・・An)が選択されて飛翔体6に送信供給される。
従って、飛翔体6は、異なる種別の目標Aに対応した操舵翼66a,66bに対する目標位置情報を、その送信供給された目標検出プログラムに基づき生成できるので、格別複雑な構成を採用することなく、異なる複数種別の目標Aに対応することができる。
(もっと読む)
レーダ装置
【課題】ドップラーを用いないことにより、パルス繰り返し周波数が低い場合に周波数分布が折返してブレード枚数が偶数か奇数かの判定が行えないことを解消した、回転翼機目標に関する種類識別のための特徴量を抽出することのできるレーダ装置を提供する。
【解決手段】受信信号にある第一閾値を設けてフラッシュを検出する第一閾値検出器1、第一閾値より低い第二閾値を設けてフラッシュを検出する第二閾値検出器2、第一閾値検出器と第二閾値検出器のフラッシュの検出周期を算出するフラッシュ周期判定器3、フラッシュ周期判定器で得られた各閾値に対応するフラッシュの周期を比較して第一閾値に関する周期が第二閾値に関する周期の二倍になっている場合にローターのブレードの枚数が奇数、両周期が等しい場合にはブレード枚数が偶数であると判断するブレード数偶奇判定器4、を備えた。
(もっと読む)
レーダ装置
【課題】ドップラーを用いないことにより、パルス繰り返し周波数が低い場合に周波数分布が折返してブレード枚数が偶数か奇数かの判定が行えないことを解消した、回転翼機目標に関する種類識別のための特徴量を抽出することのできるレーダ装置を提供する。
【解決手段】受信信号にある第一閾値を設けてフラッシュを検出する第一閾値検出器1、第一閾値より低い第二閾値を設けてフラッシュを検出する第二閾値検出器2、第一閾値検出器と第二閾値検出器のフラッシュの検出周期を算出するフラッシュ周期判定器3、フラッシュ周期判定器で得られた各閾値に対応するフラッシュの周期を比較して第一閾値に関する周期が第二閾値に関する周期の二倍になっている場合にローターのブレードの枚数が奇数、両周期が等しい場合にはブレード枚数が偶数であると判断するブレード数偶奇判定器4、を備えた。
(もっと読む)
レーダ装置
【課題】 クラッタ環境下で目標とクラッタのドプラ速度が近接している場合でも、処理規模の小さな方法でクラッタを抑圧し、かつ目標を検出する。
【解決手段】 MTI(41)の周波数フィルタの形状を決めるパルスヒット数を決める際に、クラッタが強い場合に、MTIのヒット数を多くしてクラッタを抑圧するという観点からヒット数を決め、クラッタに対しては抑圧度を大きくし、かつクラッタ近傍の目標については抑圧しないように決めた係数(44)によりMTI(41)を実施し、その信号に対してDFT(42)を実施する。このように、MTI(41)の周波数フィルタの形状を決めるヒット数を多くして、クラッタに対するヌルの形状をシャープにし、この共通のMTI出力を用いてドプラフィルタを形成することにより、フィルタバンク毎の係数制御は不要になり、処理規模の小さな方法でクラッタを抑圧し、かつドプラ周波数の近接した目標を検出することができる。
(もっと読む)
目標検出システム
【課題】時間的に振幅が大きく変化し、振幅の大きな期間が短い受信信号のSN比を改善して目標検出性能を向上および小規模化が可能な目標検出システムを提供する。
【解決手段】目標検出装置19−1〜19−l、20−1〜20−mは、送信波の反射波を受信して得られた受信信号をデジタルビデオ信号に変換する受信機4と、受信機の出力信号から不要波成分を抑圧する不要波抑圧装置9と、不要波抑圧装置の出力信号に対し、検出対象とする目標からの受信信号のパルス毎の複素共役となり且つ積分利得を最大にできるパルス方向の長さを有する参照信号とを畳み込み演算する畳み込み演算装置10−1〜10−nと、畳み込み演算結果に基づき目標を検出する検出装置8−1〜8−nとを備え、参照信号制御情報発生装置18は、目標検出装置の畳み込み演算装置に対し畳み込み演算に使用する参照信号の種類を指示する。
(もっと読む)
1 - 10 / 10
[ Back to top ]