
Fターム[5J070BB08]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡一般 (468) | 目標捜索、捕捉 (25) | 再捕捉 (6)
Fターム[5J070BB08]に分類される特許
1 - 6 / 6
誘導装置
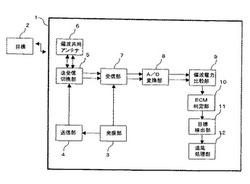
【課題】 従来の誘導装置は目標に向けて電波を送信して、目標から反射してきた信号を受信することにより目標信号を検出して追尾するが、目標信号以外に妨害機から送信されたECM信号を受信した場合には、ECM信号を目標信号であると誤認識し、目標ではなくECM信号を追尾することがあった。
【解決手段】 水平偏波及び垂直偏波を同時受信する偏波共用アンテナと偏波検出処理を有し、水平偏波及び垂直偏波の受信信号の電力レベルを比較することにより、誘導装置が目標信号を検出する際に目標からの反射信号とECM信号を識別して、安定して目標を追尾することを可能にするものである。
(もっと読む)
物体検知装置

【課題】 物体検知手段で検知した物体の自車に対する相対位置を速やかに、かつ精度良く算出する。
【解決手段】 相対位置予測手段M3が相対関係算出手段M1bにより算出された物体の今回検知時における相対位置および相対速に基づいて、複数の経過時間後における相対位置を予測し、相対位置出力手段M4が相対関係算出手段M1bの算出結果に基づいて前記予測された複数の予測位置の何れか一つを今回検知時点における相対位置として出力する。今回検知時における相対位置に基づいて車両制御を行う場合に比べて、予測した将来の相対位置に基づいて車両制御を行うことでタイムラグを最小限に抑えることができ、しかも予測した複数の相対位置のうちの何れか一つを選択して出力するので、タイムラグの減少および出力する相対位置の精度をバランス良く両立させることができる。
(もっと読む)
目標追尾装置及び目標観測システム及び目標追尾方法及びプログラム
【課題】複数の目標が重なって一つの目標として観測されたのち重なった目標が離れて再び複数の目標として観測された場合でも、正しく目標を同定できる相関処理を実現する。
【解決手段】重複判定装置115は、複数の目標が重なって一つの目標として観測されたか否かを判定する。目標間距離算出装置121は、複数の目標が重なる直前に観測された位置の間の距離(重複前距離)を算出する。目標間距離ゲート設定装置131は、重複前距離に基づいて分離判定範囲を設定する。分離判定装置132は、分離判定範囲内に新たな目標が観測された場合に、重なった目標が離れて再び複数の目標として観測されたと判定する。分離妄評移動距離算出装置133は、分離目標移動距離を算出する。分離目標判定装置135は、分離目標移動距離に基づいて重なった目標が離れて観測された複数の目標を同定する。追尾装置150は、分離目標判定装置135が同定した目標を追尾する。
(もっと読む)
物体検知装置
【課題】 物体を検知できなくなったときに該物体のデータを予測して補完する外挿処理の許可回数を適切に設定する。
【解決手段】 同一性判定手段M3は今回の検知時における予測された相対関係と算出された相対関係と比較することで、前回検知した物体および今回検知した物体の同一性を判定し、制御対象物体認識手段M4は同一であると判定された回数が判定回数に達した物体を制御対象物体であると認識する。その際に、外挿手段M5は、前回まで制御対象物体と認識されていた物体と同一であると判定される物体が検知されない場合に、相対関係予測手段M2により予測された物体を実際に検知されたものとして所定の外挿回数だけ外挿を行うとともに、同一性判定手段M3により同一であると判定された回数に比例して前記外挿回数を増加させるので、実際に物体をロストした場合に外挿が必要以上に継続されてロストした物体を対象とする不適切な制御が行われるのを防止することができる。
(もっと読む)
物体検知装置
【課題】 自車の進行方向の所定の検知領域に存在する制御対象物体を最小限の時間遅れで精度良く判定する。
【解決手段】 前回検知されたターゲットの位置および相対速から今回のターゲットの位置を予測し、その今回予測位置を中心として広い引継ぎエリア、中程度の3回目出力候補判定エリアおよび狭い2回目出力候補判定エリアを設定する。引継ぎエリア内で連続して検知されたターゲットが2回目の検知で2回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内で連続して検知されたターゲットが2回目および3回目の検知で共に3回目出力候補判定エリアに有れば、その時点でそのターゲットを制御対象物体と判定し、引継ぎエリア内でターゲットが4回連続して検知されれば、その時点でそのターゲットを制御対象物体と判定する。
(もっと読む)
目標表示装置及び目標表示方法
【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
1 - 6 / 6
[ Back to top ]