
Fターム[5J083AB10]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 用途 (922) | 追尾(トラッキング) (64) | 予測追尾 (14)
Fターム[5J083AB10]に分類される特許
1 - 14 / 14
スキャニングソナー装置および追尾方法
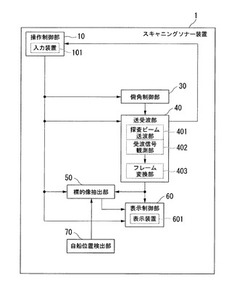
【課題】指定した追尾対象の追尾を継続することができるスキャニングソナー装置および追尾方法を提供する。
【解決手段】前回の観測結果において追尾対象とした像の重心の座標の絶対位置を基準位置とし、その周囲に追尾対象が含まれるように設定した領域を第1の観測領域として設定する第1の領域設定手順と、第1の領域設定手順によって設定された第1の観測領域内の基準位置に今回の観測結果による追尾対象の候補が存在するか否かが最初の判断である判断方法により次に追尾対象とする当該候補を設定する追尾対象設定手順と、を含む。
(もっと読む)
狭帯域信号検出装置及び狭帯域信号検出方法

【課題】受信機から入力される狭帯域信号から、自己雑音を含まない信号を検出すること。
【解決手段】入力信号に対して、所定のサンプル時刻tの時間毎に得られる方位mのビーム、周波数nのビンにおける信号強度Xt(m、n)に基づいて、方位及び周波数方向にピークを検出するとともに、前記ピークの時間的なつながりであるラインのレベルに基づいて、ステータスを「検出」として判定するステータス判定手段4を有する狭帯域信号検出装置において、前記ラインが予め定めた条件に適合する場合に、前記ステータス判定手段4の判定結果から自己雑音24に関するラインを除去する不要信号除去手段を有する。
(もっと読む)
目標運動解析装置、目標運動解析方法プログラムおよび目標運動解析方法
【課題】目標体の運動モデルを等速直進運動とすると、目標体が変針変速することにより、変針変速前後の目標の運動を正しく解析できないという問題があった。
【解決手段】本発明の目標運動解析方法は、目標体の変針変速を検出した上で、時系列観測データを用いて変針変速時刻を推定し、さらに時系列観測データを用いて、基準時刻における目標体位置座標および、推定した変針変速時刻前後の等速直進区間毎の目標体の針路、速力を推定パラメータとする非線形最適化問題を解くことである。
(もっと読む)
目標運動解析プログラム、目標運動解析装置および目標運動解析方法
【課題】観測体の変針時の速力センサ誤差やジャイロセンサの誤差に起因する観測方位のバイアス誤差が存在する。
【解決手段】目標体から放射される音波の到来方位を音響センサにより時系列的に観測した時系列観測方位データを用いて、観測体の、観測時刻、目標体に対する観測方位、位置座標東西成分、位置座標南北成分、速力東西成分、および速力南北成分を入力し、時系列観測方位データに対してバイアス誤差成分に関するインデックスを設定し、これらに基づいて、バイアス誤差成分および目標体の運動ベクトルを推定する。
(もっと読む)
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法
パーティクルフィルターに基づく音響センサーを利用した3次元空間での客体追跡方法が開示される。従来のベアリング−オンリートラッキングのためのパーティクル・フィルタリング・アルゴリズムを3次元空間で直接的に確張する代わりに、本発明は、3次元パーティクルフィルターを多様でなおかつ簡単な2次元パーティクルフィルターに再構成する。2次元パーティクルフィルターに対する再構成及び選択は、ノイズ環境での音響センサーの特性に基づく。本発明は、多重パーティクルフィルター結合で拡張されるが、本発明の剛健さと性能は、ラオの理論限界(Cramer−Rao Lower Bound:CRLB)を使って証明されうる。本発明は、計算の複雑性を減少させながらも、正確な3次元客体追跡を行うことができる長所がある。 (もっと読む)
自動追尾スキャニングソナー
【目的】
ソナーにおいて送信波が標的に反射してから自船の探知部に到達するまでの間に、自船が移動してしまうことによる誤差を抑える。
【構成】
自動追尾スキャニングソナーにおいて、GPS及びコンパスの指示値の時系列データを保持するメモリを有し、過去の任意の時刻における自船の緯度、経度、船首方位を推定することができる船位置・方位計算部と、標的からの反射波を自船で受信した時刻における標的の緯度、経度、水深を算出する標的位置算出部とを備える事を特徴とするスキャニングソナー。
(もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
自動追尾スキャニングソナー
【課題】
自動追尾スキャニングソナーにおいて、魚群等の標的のサイズ、速度が刻々変化し、或いは、予測値と観測映像との間に誤差が発生している状況でも、最適な抽出領域(位置、サイズ)を決定できるスキャニングソナーを提供する。
【解決手段】
魚群等の標的の、見掛け上のサイズの変化、加速度の変化、予測値と実測値の誤差(差分)等を、過去の複数フレーム分のデータも加味して比較・分析することで、標的の最適な抽出領域(位置、サイズ)を決定する。
(もっと読む)
自動追尾スキャニングソナー
【目的】
探査範囲を魚群の上下移動に合わせて俯角を調整することが可能とし、魚群の追尾性能が向上させる。
【構成】
自動追尾スキャニングソナーにおいて、傘状送波ビームとペンシル上受波ビームを用いて水平スキャンを実行する送受波部と、断面画像構成部と、魚群像抽出部と、魚群像位置情報算出部と、俯角−蓄積反応強度記憶部と、水平断面上動き予測部と、探査範囲制御部と、からなることを特徴とする自動追尾スキャニングソナーであり、魚群が垂直移動をした場合にも、魚群を見失わない。
(もっと読む)
状態変化検出装置および状態変化検出プログラム
【課題】監視対象の状態ベクトルを用い、F検定で状態変化を検出する方法では、観測対象が状態を変えてから観測者がその変化を検出するまでに多くの時間を要した。
【解決手段】監視対象の観測値と推定観測値との残差を計算し、監視対象が状態を変えていないモデルと、監視対象が状態を変えているモデルを定式化し、両者のAIC(赤池情報量規準)を演算して、AICが小さい側のモデルを、より尤もらしいと判断することで、短時間でも監視対象の状態変化を検出する事が可能となる。
(もっと読む)
追尾処理装置及びその方法並びにプログラム
【課題】 追尾フィルタに入力する追尾信号を有効に活用し、また各センサに対する時刻毎のそれぞれの潮流の影響を考慮して目標状態量の推定を精度良く行う。
【解決手段】 追尾信号として実際には存在しない遅延時刻(t−1)から現在時刻tまでの追尾信号、すなわち周波数情報f3(t−1),f3(t),f2(t)を、予測追尾信号外挿処理6において目標の状態量から予測し、この予測した周波数情報を新たな周波数情報として追尾フィルタ3に供給することにより、現在時刻tにおける周波数情報を得る。また、浮遊するGPS搭載のセンサから時々刻々の各センサ位置を正確に入手し、センサ毎、時刻毎の潮流情報u3(t−1),u3(t),u2(t)を周波数情報に加えて追尾信号として追尾処理を行う。時間遅延に対して追尾信号を予測する際、目標の状態量に加え、得られた各センサの潮流情報を含めて、周波数情報を算出する。
(もっと読む)
起き上がり予兆検知装置
【課題】ベッドの起き上がり動作を早く正確に検出することができる起き上がり予兆装置を提供する。
【解決手段】本発明は、ベッドに温度或いは温度変化を検知する温度センサと、距離を測定する距離センサとを具備する複数のセンサセットを設ける。そして、複数のセンサセットからのセンサ値に対してクラスタリング処理を実行し(S33)、最もヘッドボードに近いクラスタを選出する(S34)。その後、選出したクラスタの重心座標を算出し(S35)、この算出された重心座標が属する領域を判定し(S36)、重心座標が属する領域が変化し、起き上がり予兆動作の際の領域遷移に沿って起き上がり予兆状態に遷移した場合(S37〜S38)に、起き上がり予兆を検知する。
(もっと読む)
自動追尾スキャニングソナー
【課題】予測した魚群予測位置を捉えるように次回の水平スキャンにおける俯角θを制御するとともに、予測に誤差が含まれる場合にもより良い俯角に自動的に回復させることができる魚群追尾スキャニングソナーを提供すること。
【解決手段】標的である魚群を次回俯角を予測して予測追尾を行うとともに、魚群エコー強度総和が小さくなった場合には、現在の俯角から指定された所定の角度範囲内で受波ビームの俯角を振って追尾再開条件を満たす魚群エコー強度総和が得られる俯角を追尾再開時俯角として決定し、この追尾再開時俯角を基準として予測追尾を再スタートする。
(もっと読む)
センサ情報統合解析装置および方法
【課題】複数の音響センサの情報を処理する信号処理装置では、音響センサごとにパラメータを推定する必要があり、センサ数に応じて処理負荷が高くなるので、複数の音響センサのパラメータ推定にかかる負荷を低減する必要がある。
【解決手段】複数の音響センサをグループ化し、グループ内の音響センサの平均位置に1つの仮想的な音響センサが存在すると仮定し、仮想的な音響センサのパラメータの最適化を仮想的な音響センサごとに行い、各グループに含まれる音響センサのパラメータをそのグループの仮想的な音響センサのパラメータと同一に設定する。
(もっと読む)
1 - 14 / 14
[ Back to top ]