
Fターム[5J083BE20]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 受信信号処理 (1,335) | 受信信号の検出 (729) | 比較 (268) | 閾値レベル設定 (55) | 受信信号に応じて可変(アダプティブ) (11)
Fターム[5J083BE20]に分類される特許
1 - 11 / 11
ショーケースのドレン水検知装置
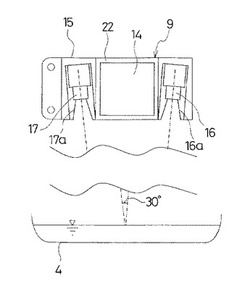
【課題】超音波を用いて、超音波を出して、対象物にぶつけて、戻ってくる時間で対象物までの距離測定する場合、限られた設置条件の中で、その距離を比較的長く確保でき、その結果として発信部分の残響影響を排除できることで、正確に測定でき、測定精度をアップできるショーケースのドレン水検知装置を提供する。
【解決手段】ドレン受け4の上方に設置し、ドレン水の水面に対して放射した超音波センサー9の発信部分からの反射信号の直接反射波を受信部分に入力してドレン水の水面から前記センサーまでの反射時間から距離を算出するショーケースのドレン水検知装置において、超音波センサーの発信部分として超音波発信素子16と受信部分としての超音波受信素子17はこれらを分離し、制御用の基板14の部分を挟んで取り付けた。
(もっと読む)
車両周辺障害物監視装置

【課題】超音波センサでの障害物の検出性能への弊害をできるだけ抑えながら検出率の向上を実現することのできる車両周辺障害物監視装置を得る。
【解決手段】画像処理部4は、車両周囲の画像情報から、車両から見た障害物の位置の測定と障害物の種類の認識を行う。超音波センサ制御部3は、反射波選択閾値パラメタや超音波発信間隔パラメタに基づいて、超音波センサ1から発信する超音波の発信タイミングの制御と、受信した反射波の強度の情報から車両周囲の障害物の検出と、車両と障害物との距離の測定とを行う。パラメタ調整部5は、画像処理部4の処理結果に基づいて超音波センサ制御部3の制御パラメタを調整する。
(もっと読む)
海底検出方法および魚群探知装置
【課題】所定深度毎にその深度での海底検出レベルを演算し、この海底検出レベルを移動することにより海底を検出する方法および装置を提供することにある。また、この海底検出レベルを、海底反射を含む反射信号が横切る深度を記憶し、当該反射信号が検出レベルを上回る場合、当該反射信号の最大値と海底検出レベルとの差を所定の範囲とすることにより、安定して海底を検出する方法および装置を提供することにある。
【解決手段】海底を検出する方法において、所定深度毎に海底検出レベルを演算し、受信機で増幅検波した反射信号を所定深度毎に演算した海底検出レベルと比較し、比較の結果により演算した海底検出レベルを移動することを特徴とする。
(もっと読む)
周期的に振動する信号応答の開始の瞬間を決定する方法
周期的に振動する信号応答E2;E2’の開始の瞬間t0を決定する方法において、信号応答は信号応答における第1の半周期E2a;E2’aの極性に等しい極性を有する半周期の第1のセットE2a−d;E2’a−dと、信号応答における第1の半周期E2a;E2’aの極性と反対の極性を有する半周期の第2のセットE2e−h;E2’e−hとを有している。方法は、第1と第2のセットの選択された一方において最高の振幅を有する半周期としてピーク半周期E2e;E2’fを決定し、ピーク半周期E2e;E2’fから既知の時間距離で生じる信号応答のゼロ交差の瞬間ZC1;ZC’1を決定し、ゼロ交差の瞬間ZC1;ZC’1およびピーク半周期E2e;E2’fと開始の瞬間t0との関係に基づいて、信号応答E2;E2’の開始の瞬間t0を決定するステップを含んでいる。 (もっと読む)
超音波乗客検出
輸送車両のドアの前側の乗客の存在を認識する方法及び機器は、ドアの近傍の空間の体積に超音波トランスミッタ/レシーバを向けること、超音波パルスを空の体積内に放射すること、エコーの強度を記録し統合すること、及び統合される値を標準値として保存すること、超音波パルスを体積内に繰り返し放射すること、及び、統合された値を標準値と比較すること、を含む。 (もっと読む)
車両用障害物検知装置および車両用障害物検知方法
【課題】 ノイズ成分が一定でない場合であっても確実な障害物検知を可能にするとともに、障害物検知の拘束処理を可能とする車両用障害物検知装置および車両用障害物検知方法を提供すること。
【解決手段】 測定対象物に対して送信波を発信し、送信波が測定対象物に反射して戻ってくる反射波を受信する超音波センサ10と、受信器による受信波をウェーブレット変換を用いて多重解像度解析して前記受信波の周波数バンドを算出し(ステップS33)、ウェーブレット変換においてノイズを除去するレベルを可変にして(ステップS31,S34)、反射波に基づいて障害物を検知するコントローラ40とを備え、受信波から前記ノイズを除去して障害物検知を行うようにした。
(もっと読む)
自律走行装置およびプログラム
【課題】本体に対し2面に壁がある状況でも多重反射による誤検知を改善する自律走行装置を提供することを目的とする。
【解決手段】複数の超音波センサ2、3と、超音波センサ2を駆動する送信手段4と、超音波センサ3の受信信号を増幅する増幅手段8と、基準電圧設定手段6と、基準電圧と増幅手段8とを比較する比較手段7と、超音波の送信後の経過時間を計時する計時手段9と、本体1と障害物との距離を認識する距離判定手段11と、距離判定手段11の出力を受けて送信手段4と基準電圧設定手段6とを制御する制御手段5とを有し、制御手段5は、本体1の動作状態と距離判定手段11の出力に応じて送信手段4の送信方法を変更する。これによって、本体が壁や障害物に囲まれた状態で、本体が動作する際、近くに存在する壁や障害物による多重反射により障害物などの誤検知を改善することができる。
(もっと読む)
超音波センサ信号処理システム
【課題】 ブラインドタイムを設ける必要がなく、反射波の波形が重なり合う場合や、パルス発生器から対象物までの距離が遠い場合、近距離であっても反射率の小さい対象物の場合でも、正確に反射波を検出できる超音波センサ信号処理システムを提供する。
【解決手段】 設定された閾値を越える入力信号を反射波として認識し、反射波信号演算部4に該反射波信号を送る反射波認識部2と、反射波認識部2が反射波と認識した時点の入力信号の最大振幅値を検出する最大振幅値検出部3と、閾値演算設定部5とを備えた超音波センサ信号処理システム1である。閾値演算設定部5は、最大振幅値検出部3により検出された最大振幅値に基づいて設定した閾値を、所定の時間毎に超音波センサ信号の減衰曲線に近似させた低い値に変更するための演算を行うとともに、該演算により得られた閾値を反射認識部2に設定する。
(もっと読む)
物体検知方法、物体検知装置
【課題】反射係数の異なる物体であっても、物体の大きさや形状を正確に識別できるようにする。
【解決手段】送波器4から間欠的に送波され検知領域内に存在する物体2で反射された粗密波を受波器6により受波して受波信号に変換し、この受波信号を用いて検知領域内の物体2を検知する方法において、物体2における粗密波の反射係数を求め、この反射係数に基づいて受波信号の強度により物体2の有無を検知するための受波信号の強度に対するしきい値を設定する。反射係数が小さい物体2ほど粗密波は反射され難く受波信号の強度のピーク値が小さくなるので、しきい値が反射係数の大小に依らずに物体2で反射された粗密波に対応する受波信号の強度より小さくなるように、反射係数が小さい物体2ほどしきい値を小さく設定する。
(もっと読む)
水中航走体の位置計測システム及び、位置計測方法
【課題】 水中航走体から発せられるピンガ信号を正確に受信するとともに、受信したピンガ信号について信号か残響によるノイズかを判別し、水中航走体の位置を算出する位置計測システムを提供する。
【解決手段】 水中航走体から所定の時刻で深度情報を含んだ第1及び第2パルスからなるピンガ信号を発信し、このピンガ信号を複数の計測ブイで受信し、計測ブイの位置情報とともに計測装置へ送信する。計測装置では所定の時刻からの伝搬時間から距離を求め、水中航走体の深度情報と、計測ブイの位置情報とに基づき、水中航走体の正確な位置を算出する。
(もっと読む)
ソナー・システムおよびプロセス
【課題】ソナーがソナー自体の送信器から受信する信号と、意図された目標からのエコーとを、一定の線形性要件および排除要件に従い効果的に弁別する方法を提供する。
【解決手段】音響的エコー信号よりも60dB以上高く存在する直接的音響信号を弁別し得るソナー・システムおよび使用方法。
(もっと読む)
1 - 11 / 11
[ Back to top ]