
Fターム[5J083DB07]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 応答器を用いるもの (85) | 応答器の構成 (83) | コード化 (7)
Fターム[5J083DB07]に分類される特許
1 - 7 / 7
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
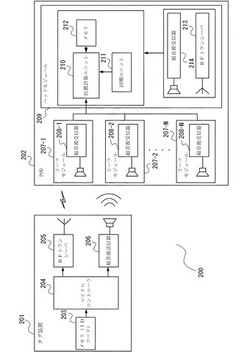
【課題】高精度、配置しやすさ、較正不要、低コスト、装置内調整および柔軟性などの利点がある、対象の所在確認および追跡を行う単一装置上の位置決定機能(POD)、自律型超音波屋内追跡システム(AUITS)を提供する。
【解決手段】AUITSは、RF信号および超音波信号を送信するためのRFトランシーバ205および超音波送信器206を含み、移動する対象に設置されたタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し、移動する対象の所在を確認するPOD202とを備える。PODは、複数のリーフモジュール207から構成され、各リーフモジュールに位置信号の受信器208があり、タグ装置から送信された位置信号を受信し、リーフモジュール間に既知の構造トポロジー関係がある。次に、各位置信号受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、対象の位置が計算される。
(もっと読む)
超音波信号通信方法および超音波センサ装置

【課題】自車両付近の人間や壁などの障害物を検知して運転者にその情報を知らせる車両用超音波信号処理装置は既に広く知られている。しかし、従来の装置ではセンサの個数の数倍の信号線が必要であり、それに伴いシステムが複雑化し、高いコストが発生していた。
【解決手段】複数のセンサからの受信波形を単一の信号線にて処理する。このことにより、大幅に信号線の数を減らすことができる。また、システムが単純になるためコストを低く抑えることが可能となる。
(もっと読む)
超音波を用いた三次元無線位置検出
本発明は、1つの移動式超音波送受信器を備えた移動式無線式構成要素と、所定の間隔を隔てた関係にある複数の固定式超音波送受信器を備えた固定式構成要素との間の位置検出方法を提供し、その方法は、無音時間を設定するために全ての送受信器をオフにするステップ、超音波信号を送信するために1又は複数の固定式送受信器を起動するステップ、通常、信号の送信と同時に、複数の固定式送受信器のそれぞれに対応した複数のタイマーを開始させるステップ、移動式送受信器で信号を受信するステップ、信号の受信に反応して移動式送受信器から信号を送信するステップ、各固定式送受信器で移動式送受信器により送信された信号を受信し、通常、最初の20個の受信されたエッジ、好ましくは最初の10個の受信されたエッジの中から見つけられた1つの受信されたエッジ、より好ましくは最初に受信された立ち上がりのエッジを受信したときに各タイマーを停止させるステップ、音速を表す所定の定数と各タイマーによって測定された各固定送受信器への信号の移動時間に基づいて移動式送受信器と各固定式送受信器の間の距離を演算するステップ、及び固定式構成要素に対する移動式構成要素の三次元位置を測定するために、演算された距離を用いて三角法の計算を実行するステップを備えている。  (もっと読む)
(もっと読む)
RFIDタグの位置特定の方法及び装置
RFIDタグが、当該タグの位置の確定を容易にすると同時に、タグのバッテリのエネルギー消費(306)を最小限する方法及び装置である。所定間隔で、タグは、その識別子をステータス情報と共に送信する(302)。ステータスが、タグが新たな位置にあることを示す場合(304)、タグは、当該タグの位置の確定に関与することにより追加のバッテリエネルギーを消費する(306)。異なる速度で伝播する2つの信号をインタロゲータから送信することにより(602/604)、インタロゲータからタグまでの距離が確定される。タグにおける2つの信号の到達時刻の差を確定することにより、インタロゲータからタグまでの距離を確定することができる(606)。  (もっと読む)
(もっと読む)
位置管理システムおよび位置管理プログラム
【課題】 位置検知が必要な空間内の様々な検知対象物の3次元位置情報をより精度良く認識する位置管理システムおよび位置管理プログラムを提供する。
【解決手段】 本発明の位置管理システムAは、位置が検知される検知対象物41,42に設けられた、互いの検知能を補完し合う二種以上の検知用タグ(超音波タグ26、RFIDタグ36)と、検知用タグの種類別に設けられ、検知用タグからの信号を受信すると当該検知用タグに付された固有のタグIDと、自己に付されている装置IDと、を含む検知結果データを生成する検知装置21,31と、取得した検知結果データと、検知装置21,31の配置データとに基づいて処理することで検知対象物41,42の位置を特定する位置データ処理装置1とを備えている。
(もっと読む)
追尾システムおよびそれに用いられる自走体
【課題】 移動体の相対位置を高精度に計測して信頼性の高い追尾が可能な追尾システム、およびそれに用いられる自走体を提供する。
【解決手段】 移動体2に配置されたトランスポンダ20とトランスポンダ20を追尾する自走体1とを含む追尾システムである。(i)自走体1は、時間T(0≦T)に関する情報を含む第1の超音波を送信し、(ii)トランスポンダ20は、第1の超音波を受信し、時間Tの経過後に第2の超音波を送信し、(iii)自走体1は、第2の超音波を受信することによってトランスポンダ20の位置を推定する、というステップを含む位置推定処理が行われる。時間Tは、第2の超音波が、自走体1の周囲に存在する物体によって反射されて受信される第1の超音波と識別可能となるように設定される。そして、上記物体の存在状況に応じて時間Tが増減されるように、物体の存在状況に応じて時間Tに関する情報が決定される。
(もっと読む)
ICタグのロケーション認識装置および方法
質問器1が、固有ID、Xa、Xb、Xcを読み取った後、IDを指定してプローブ信号発信コマンドを送信する。該当のICタグはそれぞれプローブ信号を順番に発信する。隣接するICタグ2は、質問器が指定したID,Xa、Xb、Xcを隣接IDとしてメモリに保存する。次に質問器1は隣接IDを読み取る。コントローラは、固有ID、Xa,Xb、Xcと隣接ID(Xb),(Xa・Xc)、(Xb)の組み合わせ(Xa−Xb)、(Xb−Xc)を求める。最後に繋ぎ合わせて(Xa−Xb−Xc)を得る。 (もっと読む)
1 - 7 / 7
[ Back to top ]