
Fターム[5J083EB20]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 表示装置 (356) | その他 (10)
Fターム[5J083EB20]に分類される特許
1 - 10 / 10
魚群予測位置表示システム、水中探知装置、記憶装置、魚群予測装置、魚群予測位置表示プログラム、及び魚群予測位置表示方法
【課題】魚群の位置について精度の高い予測を行って表示する魚群予測位置表示システムを提供する。
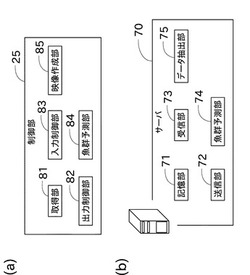
【解決手段】魚群予測位置表示システムは、取得部81と、出力制御部82と、記憶部71と、魚群予測部74と、表示部と、を備える。取得部81は、魚群状況情報を取得する。出力制御部82は、取得部81が取得した魚群状況情報を記憶部71へ出力する。記憶部71は、出力制御部82が過去に出力した複数の魚群状況情報で構成されるデータベースを有する。魚群予測部74は、前記データベースに基づいて魚群予測位置を出力する。表示部は、魚群予測部が出力した魚群予測位置に基づく映像を表示する。出力制御部82が出力する魚群状況情報には、魚群を検出したときの情報と、魚群が検出できなかったときの情報と、が含まれる。魚群予測部84は、これらの情報の対比に基づいて魚群予測位置を出力する。
(もっと読む)
魚探映像表示装置、魚群探知装置、目的地指定プログラム、及び目的地指定方法

【課題】魚探映像を表示するとともに、過去に取得した魚探映像が示す位置を目的地とする自動操舵を簡単な操作で行わせることができる魚探映像表示装置を提供する。
【解決手段】タッチパネル装置(魚探映像表示装置)11は、記憶部23と、表示部21と、制御部25と、を備える。記憶部23は、魚群探知機14が水中を探知して得られる探知データと、当該探知データを取得した位置と、を対応付けて記憶する。表示部21は、探知データで構成される魚探映像を表示する。制御部25は、表示部が表示する映像に対する指定操作が行われた場合に、指定された部分を構成する探知データに対応する位置を求め、当該位置を目的地とする自動操舵を自動操舵装置16に行わせる。
(もっと読む)
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
(もっと読む)
水中作業管理装置
【課題】水中ポジショニングシステムを利用した水中作業において、潜水士に喚起する手段、例えば、警報や退避指示を水中ポジショニングシステムから直接送る伝達手段を提供する。
【解決手段】水中作業管理装置は、船11に設けた送受波器12から発射される超音波を、潜水士13が携帯するトランスポンダ14で受信し、該受信した信号に対応する超音波信号を発射し、該発射した超音波信号を前記船に設けた送受波器で受信することで、前記潜水士が携帯するトランスポンダの位置を測定する水中ポジショニングシステムであって、前記トランスポンダに、前記送受波器から発射される特定の超音波信号を受信するとバイブレートするバイブレーション機構16を備えたことである。
(もっと読む)
音源モニタリング装置
【課題】本発明は、音源をモニタリングする音源モニタリング装置に関し、音源を容易に特定する。
【解決手段】人の目先に置かれ透視した視界に重なる画像を表示するグラスモニタと、
グラスモニタに対する固定位置に置かれグラスモニタを透視して得られる視界内から発せられた音を捉えて音信号を生成する音センサと、
上記の音信号に基づいて視界内の音源を同定する音源同定部と、
グラスモニタ上の、そのグラスモニタを透視して得られる視界上の音源に重なる位置に、音源を表わす画像を表示する音源表示部とを備えた。
(もっと読む)
ソナー・システム
【課題】船舶の移動中の操作を容易にし、船舶上の動く歩道からの高解像度画像を提供する船舶搭載可能ソナー・システムを提供すること。
【解決手段】船舶搭載可能な一体化ソナー・システムが提供される。船舶搭載可能な一体化システムは、少なくとも1つの画像ソナー・データ収集装置と、少なくとも1つの画像ソナー・データ収集装置に電気的、かつ取り外し可能に接続された少なくとも1つの処理システムとを含む。ソナー・データ収集装置は、好ましくは、処理システムに音響データを提供し、音響データを利用してソナー画像を生成する。また、システムは、関心のある標的の場所を突き止めるべく、データの正確な地理的に参照のためのデジタルのチルト及びアジマス方向を提供する。
(もっと読む)
障害物検出装置、障害物検出方法及びコンピュータプログラム
【課題】移動する移動物から障害物を検出する場合であっても、障害物の相対位置を正確に検出することを可能とした障害物検出装置、障害物検出方法及びコンピュータプログラムを提供する。
【解決手段】駐車支援処理プログラムが実行されると、測距センサ5A,5Bから超音波を車両2の側方へと送信するとともに、所定時間経過後に障害物によって反射された反射波を受信する。その後、超音波の送信位置から反射波の受信位置までの車両の移動距離、測距センサ5A,5Bの測距値等に基づいて車両が受信した反射波の反射地点Pを算出し、反射波の反射地点Pの点列データから障害物を検出するように構成する。
(もっと読む)
水中探知装置
【課題】水中情報を3次元映像としてより一層分かりやすく表示することができ、描画処理も簡単に行える水中探知装置を提供する。
【解決手段】
超音波ビームを水中に送信して3次元領域をスキャンし、受信したエコーに基づいてスキャン領域内の水中情報を3次元映像として表示する水中探知装置であって、受信ビームを所定のサンプリングレートでサンプリングして、受信ビームごとに各サンプリング点におけるエコーレベルを取得し、各サンプリング点を基準として得られるポリゴンの集合体であるエコーメッシュを、水中の所定方向に複数形成し、形成した各エコーメッシュにおけるポリゴンの各頂点のエコーレベルと閾値とを比較して、着色すべきポリゴンを再作成し、再作成したポリゴンに対して所定の着色処理を施し、ポリゴンに着色がされた各エコーメッシュを重ね合せて3次元映像を表示する。
(もっと読む)
測距方法と測距装置と駐車支援装置と測距システム
【課題】画像処理などを行う必要がなく、しかも簡単な構成で障害物と車両との間の隙間を求めることができる測距方法と測距装置と測距システムと駐車支援装置とを提供する。
【解決手段】超音波による進行波Dを送出手段3から測定対象に向けて送出し、その測定対象で反射した反射波Rを受波手段4によって受波して、送出手段3の中心線と測定対象との間の離間距離を測定する測距方法であって、受波手段4によって反射波を受波して、送出手段3から測定対象までの対象距離を求め、この後、進行波Dの周波数を変化させていき、前記測定対象で反射される反射波Rのうち最も高い周波数と、前記対象距離とに基づいて前記離間距離を求める。
(もっと読む)
マイクロホン
【課題】 マイクロホンから話者までの距離を、マイクロホンを使用するのに適正な距離に容易に設定できるようにする。
【解決手段】 マイクロホン1は、距離センサ50の出力部50Aから超音波を発射し、マイクロホン1を使用している話者で反射した超音波を入力部50Bにて検知する。またマイクロホン1は、出力部50Aが超音波を発射してから入力部50Bが超音波を検知するまでの時間を計時し、計時した時間からマイクユニット20から話者までの距離を求める。マイクユニット20から話者までの距離が、マイクロホン1を使用するのに適正な距離範囲内にある場合、マイクロホン1はLED62を点灯させる。
(もっと読む)
1 - 10 / 10
[ Back to top ]