
Fターム[5J084BA56]の内容
光レーダ方式及びその細部 (24,468) | 装置の光学系 (4,875) | 反射系に関するもの (101) | 反射鏡(リフレクター) (82)
Fターム[5J084BA56]の下位に属するFターム
コーナキューブ、コーナーリフレクター (36)
複数の光学要素からなる反射鏡 (3)
Fターム[5J084BA56]に分類される特許
41 - 43 / 43
光波距離計

【課題】 位相差方式の光波距離計において、測距光の光量に応じた測距誤差の補正量を調べて記憶させる労力を少なくする。
【解決手段】 この光波距離計は、3つの変調周波数を含む測距光(L)を測点に置かれたターゲット(22)に向けて出射する発光素子(50)と、ターゲットで反射して戻ってきた測距光を受光し、各変調周波数毎の測距信号を発生する受光素子(60)と、各測距信号を中間周波に変換する周波数変換器(66)と、中間周波をデジタル変換するA/D変換器(72)と、A/D変換器の出力から各中間周波の少なくとも1波長分のデータを記憶するメモリ(76)と、中間周波の1波長分のデータから距離を演算するCPU(74)とを備える。CPUは、1つの中間周波のデータから、その振幅を検出し、前記振幅が所定範囲内のときに、メモリに記憶された3つ中間周波のデータを用いて、ターゲットまでの距離を算出する。
(もっと読む)
位置判定及びモーショントラッキング
プロセッサベースのシステム(301)において使用される位置判定及びモーショントラッキングのためのシステム及び方法。実施形態は、固定点(132)を中心として少なくとも1つの方向に動く方向転換器(130)と、サーチビーム(131)を位置ビーム(141)として反射する対象物(101)と、方向転換器の向きから少なくとも1つの角度位置を判定する論理回路(160)と、固定点(132)からの対象物の距離(104)を判定する論理回路(161)とを含む場合がある。  (もっと読む)
(もっと読む)
自己補償レーザトラッカ
例えばレーザに基づく座標測定装置、レーザトラッカ、又はその他の座標測定装置であり得る座標測定装置を補償する装置及び方法が提供される。一つの例示的な方法では、そのような補償は、埋め込まれたトラッカターゲットによるペイロードパラメータの自己補償を包含する。別の例示的な実施形態では、そのような補償は、埋め込まれた温度センサによるペイロード、アジマスポスト、軸、又はR0パラメータの自己補償を包含する。 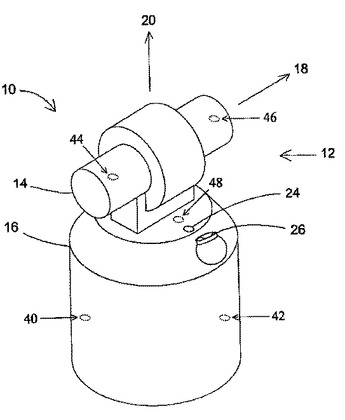 (もっと読む)
(もっと読む)
41 - 43 / 43
[ Back to top ]