
Fターム[5J084CA59]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | フリップ−フロップ (5)
Fターム[5J084CA59]に分類される特許
1 - 5 / 5
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
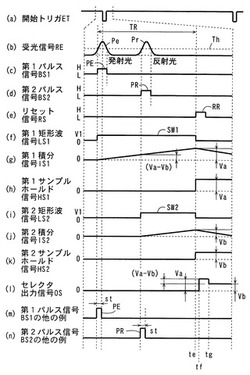
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
時間振幅変換装置

【課題】複数の時間振幅変換回路を有する場合でも、素子ばらつきの影響を小さくすることのできる時間振幅変換装置を得る。
【解決手段】電圧電流変換素子3a,3bは、増幅器11a,11bの出力電圧に対応した電流を出力する。校正時は、時間振幅変換回路20a,20bに対して、スイッチ2a,2b及びスイッチ5a,5bを切り替えることで、各々基準電流源1を接続し、電圧電流変換素子3a,3bの出力電流値を基準電流源1の電流値に収束させた際の電圧値を容量素子4a,4bの値として記憶する。
(もっと読む)
距離測定装置
【課題】ターゲットからの複数の散乱光を受光して距離を測定する場合にカウンタ数が多くなり演算処理が複雑化する。
【解決手段】コンパレータ1はレーザ光に伴う送光パルスからスタートパルスを生成し、コンパレータ2はN個のターゲットからの各受光パルスを2値化しNビットデータとして出力する。測距回路5はスタートパルスとNビットデータの内で一番早く“1”となるストップパルス間の時間を計測し基準時間として出力する。遅延線6はターゲットに対する所望の遅延ステップでストップパルスを遅延させた遅延パルスを距離分解能対応の数Mだけ出力する。ラッチ回路7はNビットデータをストップパルスおとび各遅延パルスでラッチし遅延データとして出力する。
(もっと読む)
距離測定装置
【課題】距離測定装置において、光の放射タイミングと受光タイミングとの相対誤差をフィードバック制御するにあたって、広い制御範囲に高い安定性を得る。
【解決手段】発光素子27から変調赤外線を放射し、測定対象物15からの反射光を受光素子27において複数の期間に分割して受光し、評価演算回路38が各期間の受光量から発光と受光との時間差を求め、前記測定対象物15の距離情報を測定する距離測定装置10において、相対的に遅延の小さい受光装置30側では、タイミング信号発生回路35と駆動回路36との間に固定遅延回路39を設けて前記相対誤差を粗調整する。発光装置20側には、駆動回路26の前段に遅延時間調整回路28を設けるとともに、位相比較回路19を設け、発光装置20と受光装置30との駆動信号間の位相差に対応したエラー信号で前記遅延時間調整回路28が前記相対誤差を微調整する。
(もっと読む)
SOIベースの光電子素子を利用するLIDARシステム
コンパクトな統合型LIDARシステムが、SOIベースの光電子素子を利用して、従来のLIDARシステムと比較した場合に低価格及び高信頼性を供給している。好ましくは、LIDAR送信器とLIDAR受信器(光学素子及び電子素子の両方)が単一モジュール内に統合されている。様々な光学及び電子素子が、SOI層の部分を利用して、及び既知のCMOS製造プロセス(例えば、パタニング、エッジング、ドーピング)を適用して形成され、要求されるデバイスを提供するためのSOI層上への追加の層の形成も含んでいる。レーザ光源それ自体はSOI層上へ取り付けられ、統合型変調デバイス(マッハ−ツェンダー干渉計、すなわち、MZIのような)を通じて結合され、スキャンしたレーザ出力信号(MZIに対する電気(エンコーダ)入力によって制御されるスキャン)を提供している。戻りの、反射光信号は、SOI構造内に統合される光検出器によって受信され、その後電気信号へ変換され、様々な型の信号処理を受けて、所望の型の信号特徴/特性分析を行う。 (もっと読む)
1 - 5 / 5
[ Back to top ]