
Fターム[5J084CA66]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | ビデオ信号 (13)
Fターム[5J084CA66]に分類される特許
1 - 13 / 13
物体検出装置
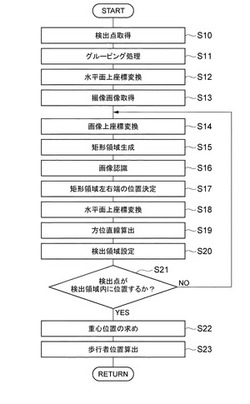
【課題】複数の物体が近接している場合であっても各物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】歩行者検出装置1は、レーザレーダ2、カメラ3、運転支援ECU4及び制動部5を備える。歩行者検出装置1は、第1の歩行者候補点群L1に対し、第1の歩行者候補点群L1の分布幅より小さい幅を有する第1の検出領域Tを設定し、第1の検出領域T内に位置する検出点P1〜P3を抽出することにより、歩行者M1の検出を行う。第1の検出領域T内に位置しない検出点P4〜P9は、第2、第3の歩行者候補点群L2,L3として順次抽出され、第1の歩行者候補点群L1と同様な処理が行われる。これにより、複数の歩行者が近接している場合であっても各歩行者を精度良く検出できる。
(もっと読む)
車両用距離画像データ生成装置

【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、画像処理部10は、パルス光を投光せずに自車両前方を撮像した外乱光ノイズ除去用のフィルタ画像に基づいて、各撮像画像の輝度を補正する。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器5と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備える。
(もっと読む)
車両用距離画像データ生成装置
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置を提供する。
【解決手段】 自車両前方に所定周期でパルス光を投光する投光器7と、撮像エリアに応じて設定される撮像タイミングで撮像エリアから帰ってくる反射光を撮像する高速度カメラ8と、撮像エリアが連続的に変化するように撮像タイミングを制御するタイミングコントローラ9と、高速度カメラ8により得られた撮像エリアの異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10と、を備え、タイミングコントローラ9は、走行環境に応じて各ターゲット距離の撮像時間の長さを異ならせる。
(もっと読む)
車両用距離画像データ生成装置および車両用距離画像データの生成方法
【課題】 自車両前方の状況を連続的に把握できる車両用距離画像データ生成装置および車両用距離画像データの生成方法を提供する。
【解決手段】 投光器5と、イメージインテンシファイア7b及び高速度カメラ8とこれらを制御するタイミングコントローラ9と、イメージインテンシファイア7b及び高速度カメラ8により得られたターゲット距離の異なる複数の撮像画像における同一画素の輝度に基づいて、画素毎の物体までの距離を表す距離画像データを生成する画像処理部10を備え、画像処理部10は、常時発光しているために全ての撮像画像に存在する画素データを、ノイズとして除去するステップS5の処理を備えた。
(もっと読む)
測距装置及び測距方法
【課題】撮像素子を駆動するための回路も簡単にすることができ、CPUへの負荷を低減することができる測距装置を提供する。
【解決手段】第1測距装置10Aは、一定間隔で同期信号Saを発生する同期信号発生部24と、強度変調された変調光12を、同期信号Saの入力に基づいて出射する発光手段14と、同期信号Saの入力に基づいて、変調光12により照射された被検出物からの反射光18を受光する受光手段20と、変調光12と反射光18の位相差から被検出物までの距離を算出する演算手段22と、同期信号発生部24から受光手段20への同期信号Saの到達時間を同期信号Saの発生回数に応じて変化させる同期信号制御手段64とを有する。受光手段20は、同期信号Saの入力を基準として一定周期ごとに設定された露光期間において反射光18の光量をサンプリングする。
(もっと読む)
三次元形状計測装置及び三次元形状計測方法
【課題】物体の三次元形状を迅速に精度良く計測する。
【解決手段】物体2に正弦波状の光パターンを投射するとともに、光パターンが投射された物体2を撮影し、その撮影画像に基づいて物体2の三次元形状を計測する三次元形状計測装置であって、短波長の光パターン20及び長波長の光パターン30の各々を物体2に投射するプロジェクタ3と、短波長の光パターン20及び長波長の光パターン30が投射された物体2を撮影するカメラ4と、カメラ4で撮影された画像に基づいて、短波長の光パターン20の相対位相及び長波長の光パターン30の相対位相を算出し、算出した長波長の光パターン30の相対位相に基づいて、短波長の光パターン20の相対位相と絶対位相との間のオフセット値を求め、該オフセット値と、算出した短波長の光パターン20の相対位相とに基づいて、物体2までの距離Zを求める制御部5とを備えることを特徴とする。
(もっと読む)
距離計測装置
【課題】背景光の影響を確実に排除する。
【解決手段】本発明の距離計測装置1は、計測対象物3に光を照射する照明手段2と、計測対象物3からの反射光を受光する受光手段4と、照明手段2が計測対象物3に光を照射していない時の受光手段4の受光データを背景光情報として記憶する背景光情報記憶手段7a,7bと、照明手段2が計測対象物3に光を照射している時の受光手段4の受光データを計測光情報とし、該計測光情報から背景光情報記憶手段7a,7bにおいて記憶した背景光情報を減じて差を算出する差分処理手段6と、差分処理手段6により算出した差が閾値以下の場合に計測不能と判定する計測可否判定手段6とを備えていることを特徴とする。
(もっと読む)
固体撮像素子を用いた三次元画像取得方法
【課題】従来より知られた固体撮像素子を用いてコスト高を招来することなく、十分に実用になる三次元画像を取得する。
【解決手段】画素が所定の方向と上記所定の方向とは直交する方向とに沿って2次元マトリクス状に配置された固体撮像素子により、被写体に照射された光の上記被写体からの反射光を受光して上記被写体の三次元画像を取得する固体撮像素子を用いた三次元画像取得方法において、被写体に対して第1の所定時間間隔でパルス状に光を照射し、上記被写体からの反射光を所定の方向に沿った画素群毎に、上記所定の方向とは直交する方向に沿って第2の所定時間間隔を開けて順次に受光してストライプ状の三次元画像を取得する。
(もっと読む)
周辺車両運動状態推定装置、自車運動状態推定装置、自車および周辺車両運動状態推定装置およびプログラム
【課題】計測機器を備えない周辺車両および自車両の挙動を解析可能にする。
【解決手段】自車および周辺車両運動状態推定装置100は、自車両に取り付けられている自車走行状態観測機器200およびビデオカメラ302と接続される。自車運動状態推定処理106は、自車走行状態観測機器200が観測した自車両の走行状態と、自車両の運動状態に関する状態遷移方程式および観測方程式とに基づき、自車両の運動状態を推定する。周辺車両相対位置推定処理108は、ビデオカメラ302が撮影した画像における周辺車両の座標と、自車両に対する周辺車両の相対運動状態に関する状態遷移方程式および観測方程式とに基づき、周辺車両の相対運動状態を推定する。座標変換処理110は、自車運動状態推定処理106の推定結果と、周辺車両相対位置推定処理108の推定結果とに基づき、周辺車両の世界座標系における運動状態を取得する。
(もっと読む)
マルチセンサおよび差分吸収LIDARデータ融合
データ取得の方法は、航空機において複数のセンサを使用する。この方法は、(a)関心対象領域(ROI)上の第1回目飛行パスの間に、関心対象目標を検出するためにDIALセンサを起動するステップであって、ここにおいて、関心対象目標は、ガスまたはオイルのパイプラインからの漏れであるステップと、(b)DIALセンサを使用して関心対象目標を検出するステップと、(c)検出された目標の位置を、ルックアップテーブル(LUT)に格納するステップと、(d)ROI上の第2回目飛行パスの間に、LUTに格納された位置において、またはほぼその位置において、別のセンサを起動するようにトリガーするステップを含む。この方法はまた、(e)両者のオン状態のセンサを使用して、関心対象目標の存在を確認するステップを含む。必要であれば、ROI上の第3回目飛行パスが行われ、LUTに格納された位置において、またはほぼその位置において、更に別のセンサが起動するようにトリガーされる。関心対象目標の存在は、3つすべてのオン状態のセンサを使用して確認される。  (もっと読む)
(もっと読む)
レンジ検知システム
本発明は、レンジ検知システムに関する。エネルギー源は、目標物による反射が可能なエネルギーを放出するようになされる。エネルギー源は、選択された供給源周波数を有する周期的パターンで始動および停止される。受信機は、放出エネルギーの、目標物からの反射を検知するようになされる。受信機は、選択された受信機周波数を有する周期的パターンで、目標物からの反射エネルギーの検知を遮断する遮蔽システムを含む。受信機の出力信号は基準信号と比較され、それによって、受信機信号と基準信号との間の位相差を使用してレンジ値が確定される。  (もっと読む)
(もっと読む)
画像処理装置
【課題】対象空間での光量変化の影響を受けずに対象物を抽出できる画像処理装置を提供する。
【解決手段】発光源2は対象空間に光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物で反射され光検出素子1で受光される反射光との対応関係によって対象物Obまでの距離を求め、対象空間の各方向に対応する画素値が距離値である距離画像を生成する。微分処理部5は、距離画像から基準平面に対する勾配方向を表す勾配方向値を画素値とする勾配方向画像を生成する。さらに、対象物判定部6は、勾配方向値を用いることにより対象物と背景の境界付近を抽出する。
(もっと読む)
1 - 13 / 13
[ Back to top ]