
Fターム[5J084CA73]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 信号圧縮、伸張 (9)
Fターム[5J084CA73]に分類される特許
1 - 9 / 9
三次元形状測定装置
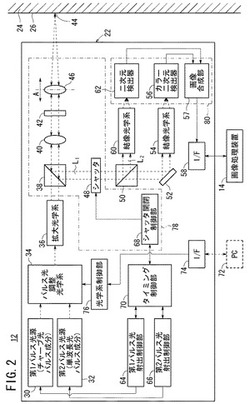
【課題】被測定物の奥行き方向の空間分解能を低下させずに測定範囲を拡大できる三次元形状測定装置を提供する。
【解決手段】色が規則的に経時変化するチャープ光パルスを生成する第1パルス光源30と、所定の波長の単波長光パルスを生成する第2パルス光源32と、ワーク24から反射されたチャープ光パルス110a、110bの第1反射光像を取得する反射光像取得部78と、前記第2反射光像の二次元情報を参照し、ワーク24から反射された単波長光パルス112の第2反射光像を取得する反射光像取得部78と、前記第1反射光像の二次元情報及び色情報を用いてワーク24の三次元情報を取得する三次元情報取得部80と、前記チャープ光パルスをワーク24に向けて照射するタイミングと、前記単波長光パルスをワーク24に向けて照射するタイミングとを調整するタイミング制御部70とを有する。
(もっと読む)
測距装置および測距方法並びにプログラム

【課題】精度良く測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、次いで、第2の測距光を発光し、第2の測距光の変調周期における複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】精度良くかつ高速に測距を行うことができるようにする。
【解決手段】測距光源16が、所定周期にて強度が時間的に変化するように変調された第1の測距光、および所定周期にて強度が一定のパルス波状に変調された第2の測距光を切換可能に発光する。第1の測距光を発光し、第1の測距光の変調周期における位相が異なる複数の受光期間において複数の第1の受光信号を取得し、複数の第1の受光信号に基づいて、第1の測距光と第1の測距光の反射光との位相差を算出し、位相差に基づいて第2の測距光の位相を第1の測距光とは異なるように変更して第2の測距光を発光する。第2の測距光の変調周期における位相差に応じた複数の受光期間において複数の第2の受光信号を取得し、複数の第1の受光信号に基づいて、距離情報の算出に使用する第2の受光信号を選択する。距離画像生成部31が、選択した第2の事項信号を用いて距離情報を算出する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】TOF方式により測距を行うための撮像手段と、ステレオマッチングにより測距を行う撮像手段を備えた立体撮像装置において、被写体への測距光の照射を制限できるようにする。
【解決手段】第1の距離画像生成部30において、第1の撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。第2および第3の撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。この際、第1の撮像部2Aによる撮像前に第2および第3の撮像部2B,2Cにより撮像を行い、顔検出部39がこれにより取得した画像から顔等の所定被写体を検出する。所定被写体が検出された場合には、第2および第3の撮像部にのみ撮像を行わせ、第2の距離画像生成部32にのみ距離画像D2を生成させる。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングによる距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから第1の距離画像D1を生成する。撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が第2の距離画像D2を生成する。画素値変更部40が、第1の距離画像D1および第2の距離画像における対応する画素の画素値の差分値を算出し、差分値がしきい値を超える第2の距離画像D2における画素を誤対応画素として検出し、誤対応画素の画素値を所定の画素値に変更する。
(もっと読む)
立体撮像装置および立体撮像装置の制御方法並びにプログラム
【課題】ステレオマッチングにより距離画像を生成する際に、立体撮像装置から被写体までの距離が大きくても、距離画像を精度良く生成する。
【解決手段】第1の距離画像生成部30において、撮像部2Aが取得した距離画像用のデータから距離画像D1を生成する。基線長変更手段38が、第1の距離画像に基づいて被写体までの距離である被写体距離を算出し、被写体距離が大きいほど撮像部2B,2C間の距離である基線長を大きくするよう変更する。基線長の変更後、撮像部2B,2Cが取得した基準画像および参照画像からステレオマッチング部31が対応点を検出し、第2の距離画像生成部32が距離画像D2を生成する。
(もっと読む)
レーザ測量装置及びレーザ測量方法
【課題】 飛行体に搭載されるレーザ測量装置において、地上局への測量データの提供のリアルタイム性を実現する。
【解決手段】 レーザ計測部は、飛行体が直線飛行航路32を飛行している計測期間においてレーザ計測データを順次出力する。送信部は、直線飛行航路32上にて、レーザ計測データが規定のファイルサイズに達すると、随時、圧縮処理を行い、レーザ計測データを地上局へ伝送する。直線飛行航路32上では、GPS/IMUが取得する飛行状態データは地上局へは伝送されず、飛行体が飛行する旋回航路34上に位置する計測中断期間に、送信部は飛行状態データを地上局へ伝送する。
(もっと読む)
レーザ計測方法及びレーザ計測システム
【課題】 飛行体と地上との間で行うレーザ計測において、即応性を高めるために、伝送データの圧縮率を高める。
【解決手段】 レーザの発射時刻データTnの圧縮効率を高める。Tnの二次差分値Δ2,nはほとんどが−1,0,1のいずれかであり、連続する2つのΔ2,nの順列パターンを4ビットの保存データ要素で表す。さらに2つの保存データ要素を組み合わせて1バイトの保存データを生成することにより、4つのΔ2,nを1バイトのデータに圧縮することができる。
(もっと読む)
航空レーザ測量における閲覧用レーザデータ生成方法
【課題】測量結果の早期の確認を可能にして即応性に対する要求に応えることのできる航空レーザ測量における閲覧用レーザデータ生成方法の提供を目的とする。
【解決手段】飛行体1上のレーザスキャナ2により地表を照射して取得したリターンパルス群内の主走査方向の各データ列から、データ取得時のスキャニング角度が予め設定された値にほぼ一致する位置基準データ3を選択する手順と、
前記データ列を位置基準データ3が一直線上に並ぶようにデータ取得順に副走査方向に配列してドットマトリクスデータ4を生成する手順と、を有して構成する。
(もっと読む)
1 - 9 / 9
[ Back to top ]