
Fターム[5J084EA26]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 姿勢制御 (7)
Fターム[5J084EA26]に分類される特許
1 - 7 / 7
距離計
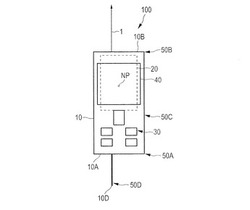
【課題】対象物までの距離を非接触式的に測定するための測定装置において、測定の正確性を向上させ、その動的領域を広げる。
【解決手段】対象物までの距離を非接触式に測定するための携帯式距離計であって、ハウジング10と、光学測定光1を使用し走時測定に基づき、対象物までの距離を非接触的に測定可能である測定器とを備え、この測定器は、光源ユニットと、光学素子を有する光学ユニットとを備え、光学ユニットは、投光・受光用光学系、測定光を対象物へと投光するための投光路、および対象物から反射/散乱した測定光を受けるための受光路を有する。さらに、投光路に影響する光学素子が初期位置から可動であり、動作センサが、ハウジングの動作を測定中に把握するように構成されており、可動光学素子は、ハウジング震揺動作の補償下で投光路が空間的確定位置に固定されるように、初期位置から可変補償位置へと移動する。
(もっと読む)
車両用電子安定プログラムのための、レーザダイオードをベースにした自己混合センサ
本発明は、簡単にした車両安定制御のための、レーザダイオードをベースにした自己混合レーザセンサに関する。自己混合レーザセンサから、車両のサイドスリップ角、前輪及び後輪スリップ角、ヨーレート並びに横方向加速度が、はっきりと導き出される。ヨーレート、旋回半径及びタイヤスリップ角の分析に基づく3つの基準が、アンダーステア又はオーバーステアの発生を検出するのに用いられ、これは、簡単にした車両用電子安定プログラムを可能にする。 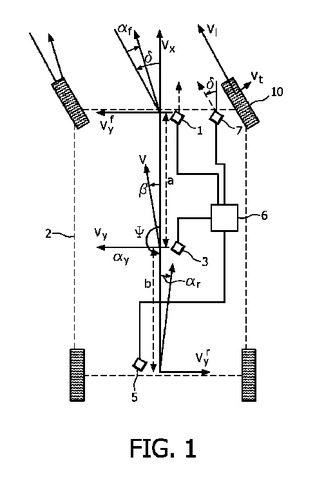 (もっと読む)
(もっと読む)
障害物検出装置、及び障害物検出方法

【課題】障害物の誤検出を防止し、障害物の検出精度の向上を図ることができる障害物検出装置及び障害物検出方法を提供することを目的とする。
【解決手段】搬送車両3Aの位置姿勢情報を割り出す位置姿勢情報演算部15bと、搬送車両3Aの周囲環境に関する形状情報を取得する第2レーザスキャナ16と、障害物を検出すべき領域に関する走行ルートSに沿った検出領域情報を記憶する検出領域情報記憶部17aと、形状情報と検出領域情報とから障害物検出領域を割り出す障害物検出領域演算部17bと、その障害物検出領域に基づいて障害物を検出する障害物検出部17cとを備える。この障害物検出装置17Aによれば、非障害物である坑内設備等を障害物として誤検出することが防止され、障害物の検出精度の向上を図ることができる。
(もっと読む)
水中移動体の位置検知装置
【課題】水中移動体の位置の検知精度を向上させることができる水中検査装置の位置検知装置を提供する。
【解決手段】水中検査装置9は、上下位置を検出するための圧力センサ18と、姿勢角を検出するための慣性センサ部19とを備えている。また、水中検査装置9は、ほぼ同一平面上の多数の方向における周囲の構造物Aとの相対距離を検出するレンジセンサユニット23を備えている。制御装置11は、圧力センサ18及び慣性センサ部19で検出された水中検査装置9の上下位置及び姿勢角等に基づいてレンジセンサユニット23の検出方向面の位置を演算し、その検出方向面位置における構造物の断面形状及びその位置を演算する。そして、制御装置11は、構造物の断面形状に対する水中検査装置9の相対位置をレンジセンサユニット23の検出結果に基づいて演算し、さらに構造物の断面形状の位置情報に基づいて水中検査装置9の水平位置を演算する。
(もっと読む)
物体認識装置および物体認識方法
【課題】 脚型ロボットまたは脚車輪型ロボットの姿勢制御に好適で、かつ、測距センサを用いた2次元距離測定装置により物体認識を行う場合に認識精度を向上するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果を直交座標系の座標に変換し、変換された測定点間を線分で接続し、得られた線上の点の座標に基づいてハフ変換により直交座標系における線分を検出し、検出した線分に基づいて物体上の連続面または連続面の境界を認識する。
(もっと読む)
物体認識装置および物体認識方法
【課題】 測距センサを用いた2次元距離測定装置により物体認識を行う場合に、認識精度を向上し測定時間を短縮するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aと、測距センサ212aの走査範囲で測定可能な測定点を含む画像を撮影するカメラ222とを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果に基づいてセンサ特徴点を検出し、カメラ222から画像を取得し、カメラ画像から線分を検出し、検出したカメラ画像の線分およびセンサ特徴点に基づいて連続面の境界を認識する。
(もっと読む)
物体認識装置および物体認識方法
【課題】 脚型ロボットまたは脚車輪型ロボットの姿勢制御に好適で、かつ、測距センサを用いた2次元距離測定装置により物体認識を行う場合に認識精度を向上するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果を直交座標系の座標に変換し、変換された少なくとも2つの測定点の座標に基づいてハフ変換により直交座標系における線分を検出し、検出した線分に基づいて物体上の連続面または連続面の境界を認識する。
(もっと読む)
1 - 7 / 7
[ Back to top ]