
Fターム[5L096EA22]の内容
Fターム[5L096EA22]に分類される特許
1 - 15 / 15
ジェスチャ認識装置及びそのプログラム
【課題】ジェスチャにより入力された多種類の図形を簡単なアルゴリズムで短時間に認識できるようにし、これによりリアルタイム性の向上を図る。
【解決手段】指位置蓄積部25に格納されたジェスチャの開始から終了までの間の描画点の位置座標の集合をもとに描画軌跡を表す画像を作成し、この描画軌跡を表す画像を含む最小の矩形領域を枠パターンを用いて切り取る。そして、この切り取られた描画軌跡を含む最小面積の矩形領域画像のサイズを正規化したのち、この矩形領域画像をもとにSVM using DtB を応用した認識アルゴリズムにより上記描画軌跡により表される図形を認識する。この認識処理は、矩形領域画像の4辺を一辺ずつ順に選択し、選択された辺から描画軌跡までの距離情報(DtB 情報)を算出してSVMモデルに入力することにより図形を識別する処理を、該当する図形が認識できるまで繰り返すことで行われる。
(もっと読む)
路面状態検出装置、路面状態検出方法、及び路面状態検出プログラム

【課題】正しく路面の勾配を検出することができる路面状態検出装置、路面状態検出方法、及び路面状態検出プログラムを提供する。
【解決手段】画像取得部は画像を取得し、区分線認識部は前記取得した画像から路面に表された1つの車線の左側を区分する区分線と当該車線の右側を区分する区分線を抽出し、路面状態判定部は前記左側を区分する区分線の方向と前記右側を区分する区分線の方向に基づき、前記路面の勾配の変化を表す勾配情報を判定する。
(もっと読む)
画像処理装置、画像処理方法、画像処理システム、及び画像処理プログラム
【課題】入力画像の特徴を基に抽出した注目領域候補の形状に応じて、初期輪郭の制御点を適切に設定できるようにする。
【解決手段】入力画像は、前処理部22にて必要に応じて解像度変換、色空間変換を受け、ROI候補領域抽出部23で注目候補領域が抽出される。抽出された注目候補領域に対して、制御点生成部24で輪郭の抽出、及びサンプリングを行う。輪郭の複雑な形状部には多くの制御点を、簡単な形状の部分には少数の制御点を割り振ることで、初期輪郭として利用するのに好適な制御点を構成することができる。
(もっと読む)
形状認識装置
【課題】2次元構造の断面データが表す形状曲線を近似するための処理を簡単に行うことが可能な形状認識装置を提供する。
【解決手段】形状認識装置Cは、3次元データが表わす外面形状の曲率が第1所定値を超える領域を抽出する曲率除外領域抽出手段14と、曲率の変化量が第2所定値を超える領域を抽出する変化量除外領域抽出手段15と、曲率除外領域抽出手段14により抽出された領域と変化量除外領域抽出手段15により抽出された領域とを除外領域として設定する除外領域設定手段16と、3次元データにおける設定領域の形状を詳細に反映した詳細形状データと粗く反映したベース形状データとを取得すると共に、夫々の形状データから除外領域に含まれるデータを除外して夫々の修正形状データを生成し、夫々の修正形状データの曲率に基づいて外面形状の歪値を抽出する形状評価手段20と、を備える。
(もっと読む)
ラベリング処理方法、並びにそのシステム、装置及びプログラム
【課題】高いビットレートでのリアルタイム処理かつパイプライン処理が可能なラベリング処理方法を提供する。
【解決手段】論理マスクが、ラベル画像のラベル値を表すラベル変数X,Y,Z,U,及びPを含み、画素毎に、注目画素が位置する前記ラベル変数Pの画素値と、前記ラベル変数Pに接続する前記ラベル変数X,Y,Z,及びUのラベル値と、ラベル間連結情報とに基づいて、前記ラベル変数P及びZにラベル値を付与し、第1の配列にラベル間連結情報を記録する工程S11と、ラベル値を付与する度に、前記注目画素が位置する行中に今後も出現するラベル値を、第2の配列に記録する工程S12と、前記ラベル間連結情報及び前記第2の配列に記録されている情報に基づいて、同じ行中に出現した前記ラベル値のみを小さい順に統合する工程S14と、前記第1の配列に記録されている前記ラベル間連結情報に基づいて前記ラベル値の変更を行う工程S15とを含む。
(もっと読む)
位置検出装置、位置検出方法、及び位置検出プログラム
【課題】人間型脚式移動ロボットや自動車が自律的に移動する際の自己の位置検出を簡単に行うことができる位置検出装置を提供することを目的とする。
【解決手段】移動体の自己位置を検出する位置検出装置であって、前記位置検出装置は、前記移動体の前方視野の画像を取得する画像取得手段と、前記画像取得手段と同一の視野を有し、前記画像取得手段が画像を取得するのと同時に距離画像を取得する距離画像取得手段と、得られた画像からそれぞれ特徴点を抽出する特徴点抽出手段と、予め記憶された物体情報と抽出された特徴点とを比較して、相関が高い特徴点を既知と特徴点と見なして自己位置を算出するための基準特徴点とする基準特徴点選択手段と、を備えたことを特徴とする。
(もっと読む)
物体検出方法
【課題】 この発明は,従来のカメラ画像を使ったパターンマッチングによる物体検出方法を改善し,対象物がシーン中で回転や傾いている時でも,演算量を少なくして高速に検出する。
【解決手段】 この物体検出方法は,距離センサを使って対象物とシーンの計測により、それぞれの形状データを求めて、それらを構成する点同士の位置の偏差を求め,その出現回数から対象物の移動量や回転量を求める。この物体検出方法は,従来のパターンマッチングと比べて,扱うデータ量が少なく,演算も加減算だけでよいため,シーン中の対象物を高速で検出することができる。さらに、実際の形状データを利用することにより見かけの形に影響されず、対象物の回転や傾きにも対応できる。
(もっと読む)
画像処理方法および画像処理装置
【課題】画像処理対象物を吸着した吸着ノズルが画像処理対象物からはみ出した場合であっても、画像処理対象物の傾き及び中心を正確に求めることができるようにする。
【解決手段】画像処理対象物の輪郭エッジ点を取得して、隣り合う輪郭エッジ点を両端とする線分を作成し、作成した線分のうち基準線に対する傾きが所定の角度範囲内にあり、且つ、前記線分のうち隣り合うものの内側端点同士が所定の範囲内にあるものを抽出し、抽出した線分の端点のうち、最も外側に位置する2点を両端とする1つの合成線分を作成し、前記合成線分のうち長さが一定値以上あり、かつ、基準線に対する傾きが所定の角度範囲内にあるものを抽出し、抽出した合成線分のうち、最も外側に位置する2つの合成線分を選択して結合し、1つの結合線分を作成する。
(もっと読む)
結腸の特徴経路の位置合わせ
【課題】CTスキャナーによる仮想内視鏡検査法において、仮想3次元対象物の複数の特徴経路の位置合わせを効率的に計算するシステムおよび方法を提供する。
【解決手段】個別地点の各経路は経路長の関数として一辺ごとに線形パラメーターに変換される。上記経路は平滑化され、正規化される。短い方の経路は多くの個別の細分間隔に分割される。該細分間隔は、コスト関数を最小化する最小化関数を用いて長い方の経路に写像され、部分最適の位置合わせを得る。上記短い方の経路は、漸進的に上記長い経路に位置づけされ、各地点で最適化が試みられる。上記短い経路がもはやシフト出来ないときには、全体最適の位置合わせが結果として戻される。
(もっと読む)
図形検出処理プログラム及び紙葉処理装置
【課題】 従来の押印検出手法では、画像上の全点について対象図形の形・大きさを表すパラメータ範囲全てに投票を行うパラメータ空間ハフ投票を行う、または画像を一方向に投影して得られるペリフェラル特徴を用いてハフ投票を行うことで検出処理を行っていた。しかし、パラメータ空間ハフ投票では計算量が膨大に掛かる。ペリフェラル特徴を用いた場合は、事前に想定する所定領域内に押印のあることが前提条件となる。そのため、伝票上の任意の位置にある判子押印の高速な検出が課題とされていた。
【解決手段】 上記課題を解決するために、高速多値輪郭抽出という処理と、輪郭区分点投票という処理を導入する。これにより、ハフ投票に掛かる計算量を削減し、高速に押印箇所の検出を行うことができる。
(もっと読む)
形状認識装置及び歪評価装置
【課題】スプリングバックなどによる変形が発生していたとしても被測定面の形状認識を正確に行うことができる形状認識装置を提供する。
【解決手段】被測定面の三次元計測データに基づいて形状認識を行う形状認識装置50が被測定面の凹凸を表す計測データの二次元断面データのうち、断面の長さ方向に沿った複数の第1データ群に対して、一定の曲率を有する第1近似曲線を夫々適用する近似曲線適用手段43と、複数の第1近似曲線の曲率を導出する曲率導出手段44と、曲率導出手段44により導出された複数の曲率の、断面の長さ方向に沿った変化データに基づいて、曲率が断面の長さ方向に沿って一様な一様範囲を決定する一様範囲決定手段45と、二次元断面データのうち一様範囲決定手段45が決定した一様範囲内に存在する第2データ群に関して、一定の曲率を有する第2近似曲線を導出する近似曲線導出手段46とを備える。
(もっと読む)
壁厚の計算
管腔境界または外側管壁境界の周界に沿った任意の点で管壁厚を自動測定するための方法。この方法はドローネー三角形分割およびマルチレゾルーションタイリングを使用する。ドローネー三角形分割のMaxMin角度特性を使用して、厚さを計算するための最小エネルギー関数を定義する。マルチレゾルーションタイリングを使用して、MaxMin角度補助定理を決定することができる。この三角形分割のMaxMin角度補助定理は、三角形分割の角度に基づいて最小エネルギー関数を定義することを可能にし、安定かつ一貫性のある幾何学計算を提供する。追加の形態学的指標を評価して脈管の形態の総合的な数量化を達成することができる。例えば壁厚に基づいて、管壁の様々な部分の様々なタイプの斑形態を区別する一組の脈管形状記述子を生み出すことができる。 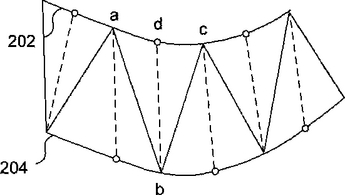 (もっと読む)
(もっと読む)
粒状物体の検査方法及びそれを用いる検査装置
【課題】検査対象の粒状物体が重なったり接触している場合でも粒状物体の個数を正確に計数できる粒状物体の検査方法及びそれを用いる検査装置を提供する。
【解決手段】画像処理部3は、画像記憶部2に記憶された二値画像から粒状物体10a,10bに対応する塊領域を抽出し、塊領域の内側に輪郭線に沿って複数の参照点を分散配置し、各参照点について塊領域内を通して見通せる他の参照点の数を計数した後、対象領域内にある参照点から計数値が最小の参照点を基準点として抽出する処理と、当該基準点から対象領域の領域内を通して見通せる参照点を全て選択し、選択された全ての参照点及び基準点の間を互いに結んでできる領域を物体領域として抽出する処理と、対象領域から物体領域を除いた領域を新たな対象領域とする処理とを繰り返し行い、検査処理部5が抽出された基準点の数をもとに粒状物体の個数を求めている。
(もっと読む)
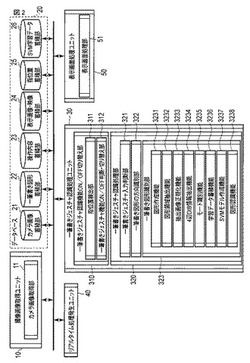
画像処理装置及び画像処理方法並びにプログラム
【課題】
本発明は、処理効率を向上し得る画像処理装置を提案するものである。
【解決手段】
認証対象を撮像することにより得られる画像データを処理する画像処理装置において、画像データを、非ゼロ要素となる画素の輝度及び位置を表すデータに変換する変換手段と、データを一時的に保持するワークメモリと、ワークメモリに保持されたデータに対して、当該データに対応する演算処理を実行する演算手段とを設けるようにしたことにより、画像データにおける非ゼロ要素以外のデータを削減すると共に、当該削減後に得られるデータに対応する演算処理を施していることから、当該演算処理を高速化することができることに加え、ワークメモリでの使用領域を飛躍的に低減することができ、かくして処理効率を向上し得る画像処理装置を実現することができる。
(もっと読む)
越波検知装置
【課題】 従来の越波検知装置では、越波以外の他の動きのある要因(車、人、自転車などの移動物体やその影、車のライトなど)が監視領域内に入ってしまうと誤検出するという課題があった。
【解決手段】 本願発明の越波検知装置は、越波の監視を行う区域の映像を撮像する撮像部と、撮像部を制御する制御部と、撮像部からの画像データを記憶するフレームメモリと、画像データから波打ち際の波の輪郭形状を抽出する波輪郭形状抽出部と、波輪郭形状抽出部で抽出された波輪郭形状の変化をもとに越波の発生を判定する越波判定部とを備え手いる。これによって、越波の判定に直接関わる波打ち際の形状を検出でき、誤検出が少なく信頼度の高い越波装置を実現することができる。
(もっと読む)
1 - 15 / 15
[ Back to top ]