
Fターム[5L096FA05]の内容
Fターム[5L096FA05]に分類される特許
21 - 40 / 95
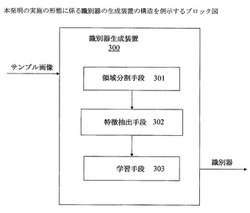
画像における特定のオブジェクトを検出する識別器の生成装置及び方法
【課題】画像における特定のオブジェクトを検出する識別器を生成する装置及び方法を提供する。
【解決手段】画像における特定のオブジェクトを検出する識別器を生成する装置は、サンプル画像から、サンプル画像の短辺の長さに等しいか又は短辺の長さよりも短い辺の長さを有する少なくとも1つの矩形の領域を分割する領域分割手段、領域分割手段により分割された矩形の領域の少なくとも1部から画像の特徴を抽出する特徴抽出手段、及び、抽出された画像の特徴に基づいて学習を行い、識別器を生成する学習手段を有する。画像における特定のオブジェクトを検出する識別器を生成する装置及び方法を使用することで、様々なアスペクト比により認識されるべきオブジェクトの認識可能な利用域を十分に利用して、複雑な背景における認識の速度及び精度を改善することが可能となる。
(もっと読む)
顔向き検出装置

【課題】ユーザの顔向きを精度良く検出できる顔向き検出装置を提供すること。
【解決手段】顔向き検出装置は、交差する縦縞及び横縞から構成された縞模様の光をユーザの顔に照射する(S11)。その顔をカメラで撮像する(S12)。撮像した顔画像から、光の縞模様を構成する矩形に対応する矩形対応部分をそれぞれ特定する(S13)。矩形対応部分ごとに、各矩形対応部分の変形具合に基づいて各矩形の法線方向を算出する(S14)。三次元モデルDB40に記憶された三次元の顔モデルの各部位の法線方向と各矩形の法線方向との誤差を算出する(S15)。誤差が閾値未満か否かを判断する(S16)。誤差が閾値より大きい場合には(S16:No)、閾値未満になるように顔モデルの三次元パラメータを変更する(S17)。誤差が閾値未満になったときの顔モデルの顔向きを運転者の顔向きとして決定する(S18)。
(もっと読む)
抽出装置、抽出方法、および抽出プログラム
【課題】抽出対象の多角形外の背景に影響されずに多角形の頂点を抽出する。
【解決手段】抽出装置は、抽出対象である多角形の内部の点を探索開始点102とし、移動先となる探索窓候補内の輝度総和値と探索窓F内の輝度総和値とに基づき、抽出対象である多角形の辺を越えないように探索窓Fを移動させる。このように、多角形の内部を探索開始点102とし、多角形の辺を越えないように探索窓Fを移動させて概頂点103の座標を算出するため、抽出対象の多角形外の背景に影響されずに概頂点103の座標を算出することができる。また、概頂点103を結ぶ線分の周辺のエッジ情報のみに基づき、多角形の辺を構成する直線を検出し、該辺の交点として多角形の詳細頂点104の座標を算出するため、抽出対象の多角形外の背景に影響されずに詳細頂点104の座標を算出することができる。
(もっと読む)
特徴図形付加方法、特徴図形検出方法、特徴図形付加装置、特徴図形検出装置、およびプログラム
【課題】対象とする図形領域以外の矩形、直線、図形等が原因となる誤検出を低減し、対象の図形領域の検出の精度を高めること。
【解決手段】対象画像データに付与する図形に応じて予め決められており、前記図形内における位置エリアに応じて画素値が異なる特徴量を決定し、当該特徴量を示す特徴量情報を出力する特徴量生成ステップと、入力する特徴量情報に基づき、前記予め決められている特徴量を含む画素値によって特徴図形を表わす特徴図形パターンを生成し、この特徴図形パターンを示す情報を出力する特徴図形パターン生成ステップと、前記対象画像データに対して前記特徴図形パターンを付与して特徴図形付加画像を作成し、当該特徴図形付与画像の画像データを出力する矩形付加ステップと、を備えることを特徴とする。
(もっと読む)
被写体数推定方法、被写体数推定装置、被写体数推定プログラム
【課題】矩形以外の形状(シルエット)を持つ被写体に対しても、画素単位の処理によって被写体数推定を精度良く行う。
【解決手段】被写体の形状(シルエット)を任意形状の微小矩形で近似し、当該微小矩形における基準表面積の積算値を求める。そして、この微小矩形における基準表面積の積算値を加算して、被写体における基準表面積の積算値を算出する。その結果、矩形以外の形状を持つ被写体に対しても、画素単位の処理によって被写体数を推定することができ、被写体の表面積算出の際の誤差を低減することが可能となる。
(もっと読む)
ジェスチャ認識装置
【課題】終点の位置ずれによる誤認識を低減して認識精度を高める。
【解決手段】カメラ4により撮像されたユーザの画像データを取り込み、この取り込まれた画像データから先ず指の初期位置を検出してこの初期位置を含む第1のサイズE0 の終始点入力判定領域を上記画像データ中に設定する。そして、上記画像データから検出される指の位置座標が終始点入力判定領域外に出たのち当該終始点入力判定領域内に戻るまでの指の位置座標の軌跡を検出している過程で、終始点入力判定領域拡大縮小部32の制御の下で、検出された指の位置座標が上記終始点入力判定領域内に存在するか否かを判定し、存在すると判定されているときには上記終始点入力判定領域のサイズを上記第1のサイズE0 より大きい第2のサイズE1 に拡大し、存在しないと判定されているときには上記終始点入力判定領域のサイズを上記第1のサイズE0 に縮小する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】線ではない画像を線であると誤って判断してしまうことを防止するようにした画像処理装置を提供する。
【解決手段】画像処理装置の線情報受付手段は、線の可能性がある画像に関する情報であって、線を構成し得る矩形の画素塊である線要素を示す情報の集合を受け付け、予測判別手段は、前記線情報受付手段によって受け付けられた線要素を示す情報に基づいて、対象としている線要素は該線要素の位置において該線要素が線を構成していると予測した場合の線要素の予測値に合致しているか否かを判別し、特徴量算出手段は、前記予測判別手段によって予測値に合致していないと判別された場合に関する前記画像の特徴量を算出し、線判別手段は、前記特徴量算出手段によって算出された特徴量に基づいて、前記画像は線であるか否かを判別する。
(もっと読む)
物体認識装置及びプログラム
【課題】位置ずれや画像のぼけが生じている場合でも、精度良く対象物の種類を識別する。
【解決手段】標識検出部22で、撮像画像から認識対象物である標識の形状を利用した手法により標識を検出し、候補領域設定部24で、検出された標識を含み、撮像画像上での位置が異なる複数の候補領域を設定する。評価画像生成部26により、設定された候補領域内の画像を撮像画像から切り出して評価画像を生成し、類似度算出部30で、標識を識別するために標識の種類毎に予め学習処理により生成された識別モデルと評価画像の各々との類似度を算出し、標識種類識別部32で、評価画像の撮像画像上での位置に応じた類似度の変化を正規分布に当てはめて算出される評価値が最も高い識別モデルの種類を、検出された標識の種類として識別する。
(もっと読む)
物体検出装置
【課題】走行する車両等から撮像された時系列画像に撮像された物体を、精度良く検出することができる物体検出装置を提供する。
【解決手段】物体検出装置100は、物体が撮像された時系列画像を取得する画像取得部110と、回帰直線により物体の動き量を最適化し、最適化した動き量に基づいて、物体が撮像された領域を時系列画像から抽出し、該領域の分布情報を出力する領域抽出部120と、領域の分布情報と時系列画像とを取得し、分布情報が表す領域を、時空間MRFによって物体毎に分割することにより、該領域に撮像された物体を検出する領域分割部140とを備える。
(もっと読む)
顔属性推定装置およびその方法
【課題】顔属性を高精度に判定することが可能な顔属性推定装置を提供すること。
【解決手段】走査領域抽出部13は、顔検出部12によって検出された顔領域から特定の顔器官が存在し得る領域を走査領域として抽出する。領域走査部14は、走査領域抽出部13によって抽出された走査領域内に小領域を設定し、小領域で走査領域内を走査しながら小領域内の画素値を順次出力する。パターン類似度算出部15は、領域走査部14から出力された画素値と、特定の顔器官に関する特定パターンとの類似度を順次算出する。そして、顔属性判定部16は、パターン類似度算出部15によって順次算出された類似度を総合的に判断して顔属性を判定する。したがって、顔属性を高精度に判定することが可能となる。
(もっと読む)
車両検出装置
【課題】カメラの設置自由度が高く、高い検出精度が得られる車両検出装置を提供することを目的とする。
【解決手段】実施形態によれば、線分抽出手段と、候補生成手段と、評価手段と、特定部位検出手段とを具備する。そして、線分抽出手段は、車両を撮影した画像から、車両の映像を構成する複数の線分成分を抽出する。候補生成手段は、複数の線分成分を用いて閉ループを生成する多角形近似を行い、車両の特定部位の領域の候補を複数生成する。評価手段は、複数の候補に対して、それぞれ複数の異なる評価を行う。そして特定部位検出手段は、評価手段の評価結果に基づいて、複数の候補のうち1つの候補を特定部位として検出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】複数の特徴点による画像の領域分割において、各領域が重複しないような三角形分割を実施するときに、特徴点の配置によっては極端に歪んだ三角形が出現するという課題がある。
【解決手段】本発明は、特に各三角形領域の形状を解析して所定レベル以上の歪みを有する三角形領域付近に特徴点を追加することによって上記歪みの大きな三角形の出現頻度を低減する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】画像の領域分割を適切に行って、画像に含まれる画素の動きベクトルの精度を向上させる。
【解決手段】複数の画像を取得し、取得した複数の画像のいずれかの画像を解析して、画像の特徴点を抽出する。また、画像の隅に画像の特徴点を追加し、少なくとも1つの特徴点を、画像の隅に位置する特徴点によって構成される4辺の辺上のいずれかの場所に追加する。そして、抽出された特徴点及び追加された特徴点に基づいて、画像に含まれる画素の、複数の画像に含まれる他の画像に対する動きベクトルを決定する。
(もっと読む)
画像処理装置、制御方法、及びプログラム
【課題】カメラなどの撮影装置で文書を撮影した場合、傾きから文書に台形状の歪みが発生する。これを補正するために文書枠を検出する必要があるが、文書領域外に直線成分が多数ある場合などには、文書枠の推定が困難である。
【解決手段】直線成分の組み合わせから文書枠候補を推定する際に、直線の直交方向への色の勾配を加味することで、余分な文書枠候補を絞り込むことを可能とする。
(もっと読む)
被写体追跡装置、被写体追跡方法及びプログラム
【課題】被写体の追跡精度の向上を図る。
【解決手段】撮像装置100であって、メモリ4に記憶された被写体の画像データを複数の領域に分割する画像分割部5bと、分割された複数の領域が有する各々の特徴情報に基づいて、撮像部1により逐次生成される画像フレームから各領域に対応する対応領域を夫々特定する領域特定部5dと、特定された対応領域に基づいて、画像フレームにおける当該対応領域を有する画像領域を追跡対象として追跡する被写体追跡部5hとを備えている。
(もっと読む)
道路環境情報取得装置及びその方法
【課題】撮像画像を基に道路環境を高い精度で検出する。
【解決手段】道路環境生成装置1は、自車両前方を撮像するカメラ2の撮像画像に、車幅方向及び車両進行方向に幅を有する方形の画素検出枠を設定する画素検出枠設定部13と、画素検出枠内の画素の情報を基に、該画素検出枠内の画像のエッジを算出する道路環境特徴算出部13と、エッジを表す複数の画素のうちの少なくとも3個の画素の位置を基に近似直線を算出する近似直線算出部14と、画素検出枠の車幅方向に延びる辺に近似直線が交差するか否かを判定する画素検出枠交差判定部15と、交差すると判定した近似直線と画素検出枠の車両進行方向に延びる辺との平行度を基に、エッジを画像内の道路環境を表すものとしての決定をする道路環境生成部16と、を備える。
(もっと読む)
目標検出装置及びコンピュータプログラム及び目標検出方法
【課題】少ない計算量で、目標と背景とを容易に区別できる評価値を算出することにより、目標の検出を容易にし、誤検出を減らす。
【解決手段】合計領域選択部132は、注目画素を通る複数の直線それぞれについて、複数の合計領域画素を選択する。直線判定部135は、上記複数の直線のうちから、合計領域選択部132が選択した複数の画素の輝度の合計または平均が最も大きい直線を判定する。背景領域選択部136は、注目画素を基準として、直線判定部136が判定した直線に対して略垂直な方向に位置する画素のなかから、複数の背景領域画素を選択する。目標判定部140は、注目画素の輝度と、複数の背景領域画素の輝度とに基づいて、注目画素が、目標画素であるか否かを判定する。
(もっと読む)
物体認識装置、物体認識方法、及びコンピュータプログラム
【課題】 物体認識に対して大きな影響を与えない特徴点を間引き、演算量を低減する。
【解決手段】 領域aにフィルタ(分布密度フィルタ)1を作用させた場合は、特徴点の密度が低いため特徴点は間引かれる。一方、領域bにフィルタ1を作用させた場合は、特徴点の分布密度が高いため特徴点は残る。また領域cにフィルタ(縦線フィルタ)3を作用させた場合、特徴点は横線の分布を示し特徴点の分布密度が小さくなるため、ここでは間引き候補であるが、フィルタ(横線フィルタ)を適用する際に大きな値を示すので特徴点が残る。また、領域dにフィルタ(縦線フィルタ)3を作用させた場合、特徴点は縦線の分布を示し分布密度が大きくなるため、特徴点は残る。このように、特徴点に対してフィルタリング処理を行うことにより、物体認識に対して大きな影響を与えない特徴点を、効果的に間引くことができる。
(もっと読む)
画像処理システム
【課題】風景画像認識技術に利用される効果的な参照用画像データの作成が重要となるので、そのような効果的な参照用画像データの作成に適した画像処理システム。
【解決手段】車両からの風景を撮影した撮影画像から当該撮影画像中における識別可能な事物を特徴オブジェクトとして認識し、この特徴オブジェクトを規定する1つまたは2つ以上の代表画像特徴点を抽出し、撮像画像内における代表画像特徴点の位置を表す特徴点位置情報と特徴オブジェクトの属性であるオブジェクト属性を表す属性情報とを含む特徴点データが生成される。さらに、この特徴点データに撮影位置を関連付けて、風景画像マッチングの参照データが生成される。
(もっと読む)
対象物検知装置
【課題】画像監視装置において、隠蔽に対応するために検知対象物の部位を検出する場合、部位の検出効率と検出結果の信頼性との間にトレードオフの関係が生じる。
【解決手段】個々は対象物体像に応じた形状の枠領域内にて一部範囲を占め、位置が異なる複数種類を設けることにより当該枠領域の各所に配置される部位として、個々の大きさが異なる複数種類のものを設定する。部位ごとに検出器を設け、入力画像の対比部分が当該部位における対象物体像と一致するかを検出する。一致した部位にはその大きさに応じた投票値を設定する。同じ枠領域に属する部位について投票値を集計して、集計値が閾値を超える場合に対象物が存在すると判定する。
(もっと読む)
21 - 40 / 95
[ Back to top ]