
Fターム[5L096FA05]の内容
Fターム[5L096FA05]に分類される特許
41 - 60 / 95
ジェスチャ認識装置、ジェスチャ認識装置の制御方法、および、制御プログラム
【課題】特殊な手段を用いず、ユーザにとって自然な操作かつ装置にとって低負荷処理で、ジェスチャの開始と終了とをジェスチャ認識装置に正しく認識させる。
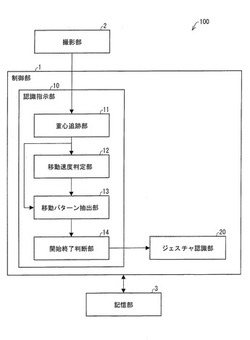
【解決手段】動画に写る認識対象物の動作からジェスチャを認識する、本発明のジェスチャ認識装置100は、動画に写る特定の特徴を有する特定被写体(掌など)を検出する重心追跡部11と、特定被写体の単位時間あたりの移動速度を算出する移動速度判定部12と、特定被写体の移動パターンを抽出する移動パターン抽出部13と、移動速度と移動パターンとが予め定められた条件を満たす場合に、特定被写体の動きを、自装置に対して入力された指示(ジェスチャ認識処理の開始または終了の指示など)として識別する開始終了判断部14とを備えていることを特徴としている。
(もっと読む)
画像認識装置、画像認識方法及び画像認識プログラム

【課題】2次元画像内の検出対象図形を適切に認識することができる画像認識装置、画像認識方法及び画像認識プログラムを提供する。
【解決手段】エッジ画像からハフ変換により作成した角度θと距離ρとで構成される2次元度数分布から、等しい角度θを有する2つの投票点の組を複数抽出し、これらを対象図形の辺を構成する図形候補群とする。次に、抽出した図形候補群の中から、対象図形の辺の長さ及び各辺への垂線の交差角度に基づいて少なくとも2つの上記組を選択することで、エッジ画像における対象図形のエッジ領域を選定する。そして、選定した対象図形のエッジ領域に、十分な数のエッジ点が存在することを確認する。
(もっと読む)
ボールグリッドアレイデバイスの位置合わせ及び検査のためのシステム及び方法
不均一な特徴部を有するBGAデバイスなどの部品の高速位置合わせ及び検査のためのシステム及び方法を提供する。機械視覚システムのトレーニングタイム中に、粒度を選別するための幾何学解析の量及び位置合わせ有意ブロブの小さなサブセットが決定される。さらにトレーニングタイム中にボールがグループに関連付けられ、各グループは独自の検査用パラメータセットを有する。 (もっと読む)
地理情報生成システム及び地理情報生成方法
【課題】建物形状を正確に抽出することができる地理情報生成システムを提供する。
【解決手段】空中写真から建物の形状を抽出する地理情報生成システムであって、プログラムを実行するプロセッサと、前記プログラムの実行に必要なデータを記憶するメモリと、前記空中写真を格納する記憶部と、を備え、前記プロセッサは、前記記憶部に格納された空中写真中の隣接する画素の特徴量に基づいて、画像のエッジを検出し、前記検出されたエッジの方向を解析することによって、建物の方向を抽出し、前記抽出された建物の方向の直線を用いて、該建物の外形のポリゴンを生成することを特徴とする。
(もっと読む)
マーカー検知装置及びマーカー検知装置用プログラム
【課題】 撮像画像から予め定めたマーカー画像を認識し、マーカーを検知する際、小さい処理負荷で迅速に検知を行えるようにする。
【解決手段】 マーカーは4つの三角形をマーカー要素とし、近接配置した同一三角形の要素(A,A’)よりなる第1要素ペアP1と異なる同一三角形の要素(B,B’)よりなる第2要素ペアP2を図1(B)のように組み合わせて構成する。ペアP1とペアP2の位置関係は、図1(C)のようにペアP1の三角形(A,A’)それぞれの重心を結ぶ直線Cと、ペアP2の三角形(B,B’)それぞれの重心を結ぶ直線Dが所定の角度で交差するように配置する。撮影画像から白領域の形状パラメータ(円形度)を算出するという簡単な処理で要素を認識し、要素間の単純な関係を求めることでマーカーを検知することができる。
(もっと読む)
対象物追跡装置及びプログラム
【課題】対象物が路面に接する接地位置が撮影範囲から外れたり、遮られたりしている場合であっても、自車両の直近まで対象物を追跡して、精度よく対象物の路面上の位置を推定する。
【解決手段】対象物検出部42で、過去の撮像画像から求められた対象物の路面上の位置、及び車両運動情報に基づいて、現在の対象物の路面上での位置を予測して、対応する現在の撮像画像上の位置に検出枠を設定することで対象物を検出し、第1の位置推定部48で、検出枠範囲判定部44で検出枠の下側領域が撮影範囲内であると判定された場合に、検出枠内の画像の足元位置に基づいて、対象物の現在位置を推定し、第2の位置推定部50で、検出サイズ判定部46で検出枠のサイズが予め定めた大きさ以上であると判定された場合に、過去の撮像画像における対象物に対する現在の撮像画像における対象物の拡大率に基づいて、対象物の路面上の現在位置を推定する。
(もっと読む)
文書内の表の自動的な位置特定
本発明は、文書内で表を位置特定するための方法であって、文書のための複数のタイルを定義するステップと、タイル毎に水平プロファイルおよび垂直プロファイルを決定するステップと、水平プロファイルおよび垂直プロファイルの勾配を用いて線の位置を検出するステップと、前記線から存続する線を選択するステップと、存続線に基づいて文書の少なくとも1つのコーナ内の矩形を決定するステップと、文書の表として決定された矩形を受け入れまたは拒絶するためにヒューリスティックを適用するステップとを含む、方法に関する。本発明はまた、本発明による方法の適用によって文書内で表を自動的に位置特定するための機器にも関する。 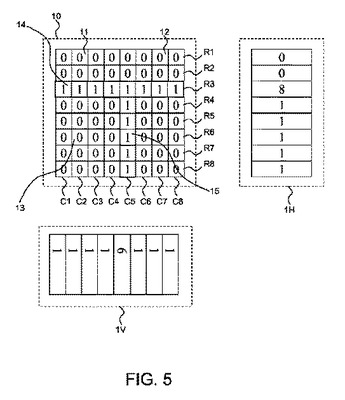 (もっと読む)
(もっと読む)
顕微鏡画像の自動解析法
【課題】細胞の蛍光画像等の生物被写体の顕微鏡画像の自動解析法を提供する。
【解決手段】本発明の方法は、a)試料から少なくとも2個の顕微鏡画像を撮影工程と、b)抜粋画像から正の訓練セットを決定する工程と、c)一連の抜粋画像から負の訓練セットを決定する工程と、d)分類値に訓練セットの特性を割り当てる工程と、e)一連の画像の分類値をd)で決定した割り当てを用いて自動的に決定する工程と、f)分類値を閾値と比較することにより生物被写体の位置を認識する工程と、を含む。上記試料は特に生体組織であり、生物被写体は特に細胞である。生物被写体は、顕微鏡画像撮影に先立って1または複数の化学マーカーで標識付けされる。
(もっと読む)
モデルデータ作成装置、モデルデータ作成方法、物体認識装置、及び物体認識方法
【課題】物体の一部分が遮蔽されている場合でも精度よく物体認識を行う。
【解決手段】リファレンス物体の形状を特徴点群で表した基準画像内に設けられた基準点と、特徴点群のうち3つの特徴点が頂点となる二等辺三角形モデルとに基づいた、リファレンス物体の角度、スケーリング、及び位置の属性を有したパラメーターを登録したモデルデータを予め登録する。そして、物体認識処理においては、特徴点群Fのうち特徴点P,Q,Sが頂点となる二等辺三角形モデルを設定し、記録されたモデルデータの中から二等辺三角形モデルの相似形である二等辺三角形モデルに対応したパラメーターを検索する。そして、パラメーターに基づいて、被検査対象物体の角度、スケーリング、及び位置を計算する。さらに、その計算結果に基づき投票処理を行うことによって、検索対象画像から被検査対象物体を認識する。
(もっと読む)
特徴抽出装置及び目標追尾装置及びコンピュータプログラム及び特徴抽出方法及び目標追尾方法
【課題】輝点が高密度で観測される場合であっても、輝点の追尾などを可能にする情報を、画像から抽出する。
【解決手段】ピーク抽出部121は、対象画像を構成する複数の画素のなかから、隣接する画素よりも輝度が高い画素(ピーク画素)を抽出する。輝点領域記憶部131は、ピーク抽出部121が抽出したピーク画素を含む一以上の画素を、輝点領域として記憶する。周辺画素抽出部132は、輝点領域に含まれる画素に隣接する画素であって、輝点領域に含まれない画素(周辺画素)を抽出する。輝度比較部133は、周辺画素の輝度と、輝点領域に含まれる画素の輝度とを比較する。周辺画素の輝度が輝点領域に含まれる画素の輝度よりも低い場合に、輝点領域拡大部134は、周辺画素を輝点領域に追加する。
(もっと読む)
認証装置
【課題】多様性の影響が小さくて認証精度が高い認証装置を提供する。
【解決手段】中央演算処理装置と、入力部と、形状主成分、テクスチャ主成分及び母音(あ、い、う、え、お)又は撥音(ん)の特徴量を表すパラメータが関係付けられたデータベース並びに第1の文字列を含む記憶装置と、出力部とを備え、中央演算処理装置は、顎と唇を含む顔の下半分形状を表す画像データ列から特徴量を表すパラメータ計算し、そのパラメータとデータベースを基に画像データを母音(あ、い、う、え、お)及び撥音(ん)のいずれか一つに対応付けすることにより第2の文字列を生成し、第1及び第2の文字列が一致する場合に認証を許可する結果を出力部に出力するステップを実行させるプログラムを備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】簡易に過学習を検出し、効率的に学習を行うことを目的とする。
【解決手段】記憶装置に保持されている学習データに基づいて、弱判別器について順次、学習を実行する学習手段と、学習の際に算出する弱判別器に対する評価値の推移に基づいて、過学習か否かを判定する判定手段と、過学習であると判定された場合、新たな学習データを追加し、弱判別器についての学習を継続させる制御手段とを有することによって課題を解決する。
(もっと読む)
対象物検出装置
【課題】 撮影により得られた画像から個々の対象物を的確に、しかも処理負荷を抑えて検出することが可能な対象物検出装置を提供する。
【解決手段】 多値画像(a)である探索対象画像において設定された画素値範囲(128〜255)を“1”、その他を“0”として二値化処理を行う。二値化画像(b)において、“1”の値をもつ抽出の対象画素について、多値画像を参照し、対象画素の画素値に比べ小さい画素値をもつ8近傍画素の個数が所定の閾値未満の場合、その対象画素の値を“0”として抽出対象から除外する。このようにして、複数の対象物の境界部と判断される画素を抽出対象から除外することにより、的確に輪郭を判定することが可能となる。
(もっと読む)
情報処理装置及び情報処理方法
【課題】従来技術より短い処理時間でN次元配列上の領域に関する1次以上の統計量を求めることを目的とする。
【解決手段】N次元配列(N≧2)の入力情報を読み込む入力手段と、入力情報からN次元配列の原点を頂点とする多角形領域内のモーメントを計算する累積モーメント計算手段と、モーメントをN次元配列である累積情報の各成分に書き込む累積情報生成手段と、を有することによって課題を解決する。
(もっと読む)
画像処理装置と画像処理方法および撮像装置
【課題】簡単かつ容易に撮像画像から提示画像を検出する。
【解決手段】ステップST102では、提示装置によって提示された提示画像を撮像して得た撮像画像の輝度信号を閾値と比較して2値化信号を生成する。ステップST104,105では、2値化信号から閾値を超える画素の水平方向および垂直方向の分布を取得する。ステップST106では、水平方向の分布から提示画像の水平方向の辺の検出を行い、ステップST107では、垂直方向の分布から提示画像の垂直方向の辺の検出を行う。2値化信号に基づく水平方向および垂直方向の分布から提示画像の辺を検出することで、簡単かつ容易に撮像画像から提示画像を検出できる。
(もっと読む)
メッシュ衝突回避
本発明は、モデルベースの画像セグメント化を用いて画像データにおける対象物をセグメント化するシステム100に関する。このシステムは、メッシュの現在の位置に基づき上記メッシュの外部エネルギーを計算するため、上記画像データにおける特徴を特定する特徴ユニット120を有する。この特徴ユニット120は更に、上記画像データにおいて特定される上記特徴に含まれることになる特徴を特定するため、上記画像データにおける複数の候補特徴を選ぶ候補特徴ユニット122と、上記画像データの領域に対する上記複数の候補特徴の各候補特徴の位置を決定する位置ユニット124と、各候補特徴の強度を計算する特徴関数ユニットであって、上記各候補特徴の強度が、上記領域に対する上記各候補特徴の位置に依存する、特徴関数ユニット126と、上記複数の候補特徴の各候補特徴を評価し、上記評価に基づき上記複数の候補特徴における上記特徴を特定する評価ユニット128とを有する。回避されるべきである上記領域内部に、例えば、上記画像データにおける別の対象物に対して適合される別のメッシュ内部に、選ばれた候補特徴が配置されるかどうかを決定すると、上記各特徴の強度の上記計算の間、及び従って上記複数の候補特徴の上記評価の間、この候補特徴に罰を科すことが可能になる。 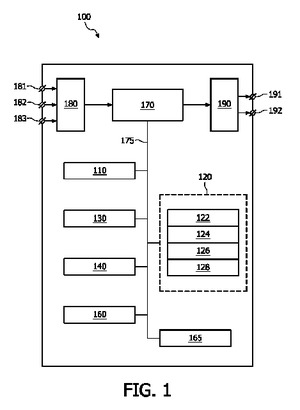 (もっと読む)
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】複数の画像間で比較を行う場合に、その比較のための位置合わせの基準となる領域を探索する処理量を削減するようにした画像処理装置を提供する。
【解決手段】画像処理装置の領域抽出手段は、画像内の連結領域を抽出し、形状判定手段は、前記領域抽出手段によって抽出された連結領域の形状を判定し、領域選択手段は、前記形状判定手段によって判定された形状に基づいて、他の画像と比較するための位置合わせに用いる領域を選択し、画像比較手段は、前記領域選択手段によって選択された領域を用いて、前記画像と前記他の画像との比較を行う。
(もっと読む)
肌色評価方法、肌色評価装置、肌色評価プログラム、及び該プログラムが記録された記録媒体
【課題】高精度に肌色を評価する。
【解決手段】入力された顔領域を含む画像から肌色を評価する肌色評価方法において、前記画像の顔領域全体に対して予め設定される少なくとも25箇所からなる第1特徴点と、前記第1特徴点を用いて設定される第2特徴点とにより所定の領域に分割する分割ステップと、前記分割ステップにより分割された領域毎に、L*a*b*表色系におけるL*,a*,b*、Cab*、hab、XYZ表色系における三刺激値X、Y、Z、RGBの各値、色相H、明度V、彩度C、メラニン量、及びヘモグロビン量のうち、少なくとも1つを用いて平均値による肌色分布を生成し、測定結果に基づく評価を行う肌色分布評価ステップと、前記測定結果又は評価結果を画面に表示する画面生成ステップとを有することにより、上記課題を解決する。
(もっと読む)
タイヤ表面を検査するために使用できるようにするようタイヤ表面の3次元画像を処理する方法
タイヤの表面の一部分を検査する方法であって、表面が隆起マークを有し、この方法では、検査されるべき表面の3次元プロフィールを求め、検査されるべき表面上の特徴的な箇所の存在場所を突き止め、これら箇所を基準面の3次元データから得られた対応の特徴的な箇所と照合して1組の対をなす照合状態の特徴的箇所を生じさせ、繰り返し、第1の変換関数により変換された基準面の特徴的箇所の各々とこれらと照合された検査されるべき表面の特徴的箇所の各々との間の相互間の距離の合計を表す値が最小であるように基準面の特徴的箇所に適用されるべき第1の変換関数を探し、第1の変換関数を基準面の特徴的箇所の全てに適用して変換済み基準面を得る検査方法。  (もっと読む)
(もっと読む)
情報処理装置、及び情報処理方法
【課題】オリジナルの電子ファイルが持っているベクタ情報から、精度の高い矩形領域の抽出や領域指定を行う情報処理装置及び情報処理方法を提供することを課題とする。
【解決手段】
本発明に係る情報処理装置は、電子ファイルのベクタ情報を読み込み501、前記ベクタ情報から、線分オブジェクトにおける線分パラメータ情報を抽出502し、また多角形オブジェクトにおける多角形パラメータ情報を抽出し抽出した多角形パラメータ情報から該多角形を構成する線分の線分パラメータ情報を抽出503する。抽出された線分パラメータ情報に基づいて、矩形パラメータ情報を抽出505し、抽出された矩形パラメータ情報により構成される矩形が、矩形を内包しない矩形である最小矩形であるかを判定506する。
(もっと読む)
41 - 60 / 95
[ Back to top ]