
Fターム[5L096FA05]の内容
Fターム[5L096FA05]に分類される特許
81 - 95 / 95
オブジェクト検索システムおよび方法

【課題】特徴量が変化する同一および同種のオブジェクトを検索するのに適したオブジェクト検索システムおよび方法を提供する。
【解決手段】オブジェクト検索システム10は、オブジェクトを含む入力画像に対して、特徴量記憶装置23に格納されている色に関する各クラスタが持つ特徴量を用いて、段階的に第1のオブジェクト候補領域の絞込みを行う第1のオブジェクト候補領域抽出部16と、第1のオブジェクト候補領域に対して、特徴量記憶装置23に格納されている形状に関する各クラスタが持つ特徴量を用いて、段階的に第2のオブジェクト候補領域の絞込みを行う第2のオブジェクト候補領域抽出部17と、第2のオブジェクト候補領域からオブジェクト領域を決定して、入力画像に含まれているオブジェクトを求めるオブジェクト領域決定部18とを具備する。
(もっと読む)
複合マーカ情報取得装置

【課題】適切なタイミングでマーカと非接触IDタグの情報の読み取りを行えるようにすること。
【解決手段】所定の撮影範囲を有し、当該撮影範囲内の対象物に固定された光学的な特徴を有するマーカ11を撮影するカメラを含む画像入力部21と、上記マーカ11に対して相対的位置が固定され、上記マーカ11又は当該マーカが固定されている対象物に関連する情報を保持する非接触IDタグ12から、当該情報を取得するRFID読取部23と、を備える複合マーカ情報取得装置としての情報呈示装置20において、上記撮影した画像に基づいて上記RFID読取部23に非接触IDタグ12から情報取得を行なわせる。
(もっと読む)
類似画像検索装置、方法およびプログラム
【課題】 検索精度を上げることができる類似画像検索装置、方法およびプログラムを提供すること。
【解決手段】 被検索対象画像を取り込む画像入力部110と、画像入力部110によって取り込まれた被検索対象画像の自己相関波形を抽出する自己相関波形抽出処理部132と、抽出された自己相関波形の傾向が変化する接合点を抽出する接合点抽出処理部134と、接合点によって分割される自己相関波形の各区分領域のそれぞれを関数で近似する関数近似処理部136と、関数近似処理部136による近似処理に関連する特徴情報に基づいて、複数の比較対象画像の中から類似した画像を検索する類似度判定処理部140とが備わっている。
(もっと読む)
画像処理装置、その方法およびその制御方法
【課題】 情報が電子化されたことで、情報の広範囲な共有や活用がより容易に行われるようになり、電子文書および電子文書をプリントした文書の管理が非常に重要である。
【解決手段】 会議終了後、参加者は、MFPに配布資料の文書画像を読み取らせ(S2101)、MFPは、記憶部の情報を参照して、読み取った文書画像に一致するデータファイルを検索し(S2105)、検出したデータファイルを削除する(S2108)。もし、読み取った画像の頁数が不足する(S2102、S2103)、データファイルが検出できない、読み取った文書画像が一部欠如している(S2106、S2107)場合は警告を発する。そして、回収終了通知を受けると(S2109)、MFPは、記憶部の情報を参照して、当該会議に関連する全データファイルが削除したか否かを判定し(S2110)、未削除のデータファイルがあり、当該データファイルがプリントされている(S2111)場合は、警告を発する(S2113)。
(もっと読む)
紙葉類識別方法及び紙葉類識別装置
紙幣の透過画像の各画素の濃度を一次微分する(図5,S21)。次に、微分結果を所定のしきい値と比較して単純二値化し、紙幣の輪郭線を抽出する(S22)。次に、二値化した輪郭線をハフ変換し、ハフ平面の同じ点を通る輪郭線を同一直線として抽出する(S23)。次に、ハフ変換により得られた点に対応する直線で囲まれる矩形を抽出する(S24)。矩形の重なりなし部分のドット数が所定のしきい値未満でなければ、重なりなし部分を紙幣の画像として切り出す(S26)。そして、切り出した画像と基準となる画像を比較し、紙幣の金種を特定する。 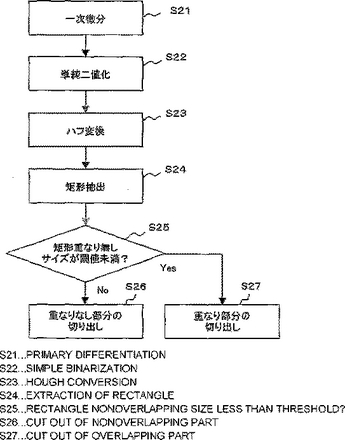 (もっと読む)
(もっと読む)
テロップ消去方法、テロップ消去装置、及びテロップ消去プログラム
【課題】テロップを消去して、テロップを含まない元の画像に容易かつ精巧に復元することができる。
【解決手段】テロップ背景置換装置1は、画像入力手段11において入力したテレビ、映画などの電子化された画像を画像蓄積手段12に蓄積し、テロップスーパーインポーズ検出手段13において、画像中に含まれるテロップやスーパーインポーズの領域を検出し、検出された領域をマスク画像として蓄積し、画像細かさ検出手段14において、マスク画像近傍の元の画像を参照して、画像の細かさを検出し、ミクロテクスチャかマクロテクスチャかを判別し、ミクロマクロテクスチャ復元手段15において、テロップやスーパーインポーズされた領域をマスク画像近傍の元の画像情報に従って、ミクロテクスチャ生成補完法又はマクロテクスチャ生成補完法により復元し、画像中からテロップやスーパーインポーズ領域をテロップやスーパーインポーズのない元の画像に置換する。
(もっと読む)
画像処理装置及び画像処理方法及びプログラムを記録したコンピュータ読み取り可能な記録媒体及びプログラム
【課題】 画像に対する評価を判定する画像処理装置に係り、未知の画像の構図について、その“安定・不安定”、“賑やか・静か”などの感性による評価の度合いを判定することを課題とする。
【解決手段】 学習用画像から抽出した特徴量データを入力し、学習用画像に対する感性についての心理実験結果から得られた感性情報正解データ(感性情報目標データ)を出力するように、学習用神経回路網6を誤差逆伝播法で学習させ、結合荷重を得る。そして、特徴抽出部5で、判定対象の画像から特徴量データを抽出し、学習用神経回路網6と同様の構成の判定用神経回路網9で、特徴量データを入力し、前記結合荷重に従って演算処理を行い、判定結果として感性出力データを出力する。
(もっと読む)
画像照合装置、画像照合方法、画像照合プログラム
【課題】画像の一部に不良な領域が存在する場合であっても、誤った拒否を発生させない。
【解決手段】領域配置処理部7は、第1画像データに複数の第1領域を固定的な位置関係で配置し、最大相関領域検出処理部8は、第1画像データに配置された第1領域のデータとの相関が最大となる領域を第2画像データから検出する。照合判定処理部9は、第1画像データに配置された第1領域の分布と第2画像データから検出された領域の分布とに基づいて、領域の相対ずれ量が既定ずれ量よりも小さくなる領域の配置を判定する。領域配置処理部7は、照合判定処理部9により判定された領域の配置の位置関係に応じた位置に複数の第2領域を可変的に配置する。最大相関領域検出処理部8は、可変的に配置された第2領域のデータとの相関が最大となる領域を第2画像データから検出し、照合判定処理部9は、第1画像データに配置された領域の分布と第2画像データから検出された領域の分布とを比較して、第1画像データと第2画像データとが同一であるか否かを判定する。
(もっと読む)
高精度マーク位置・姿勢検出装置
【課題】低解像度カメラによる画像に対しても少ない画像計測処理量により高精度のマーク姿勢、マーク位置を求める装置を提供すること。
【解決手段】上記課題を達成するため、本発明では、2組以上の方向の異なる平行な辺を有し、画面上での形状が既知であるマークについて、テレビカメラで撮影したマークの画像を画像処理して得られるマーク上の全平行辺上の計測点と全平行辺の既知の位置関係との誤差の2乗和が最小となるマークの姿勢を画素分解能以下の精度で求め、次にマークの位置を画素分解能以下の精度で求める。
(もっと読む)
特徴識別装置およびその方法並びにプログラムコード、記憶媒体
【課題】 配置の自由度が高く、かつ、識別可能な種類の多い画像特徴を識別すること。
【解決手段】 画像中から第一の画像特徴の投影領域を抽出する第一特徴抽出部と、前記画像中から前記第一の画像特徴の周辺に位置する第二の画像特徴の投影領域を抽出する第二特徴抽出部と、前記第一の画像特徴を該第一の画像特徴の周辺に位置する前記第二の画像特徴の数および/またはトポロジーにより識別する第一特徴識別部とを備えることを特徴とする。
(もっと読む)
画像処理方法、画像処理装置
【課題】 画像特徴の一部が隠蔽されていても、この画像特徴を識別するための技術を提供すること。
【解決手段】 現実物体の表面上に当該現実物体を特定するための識別子を表す1セットのコードを複数配する。
(もっと読む)
画像処理による移動物体計測方法及び装置
【課題】計測誤差をより小さくする。
【解決手段】移動物体を撮像するビデオカメラ10から遠ざかる方向へ移動物体が移動するときには移動物体の略後端を代表点とし、ビデオカメラ10へ近づく方向に移動物体が移動するときには移動物体の略前端を代表点とし、代表点に関する物理量を計測する。移動物体の領域に対する相対位置を移動物体の代表点として予め定めておいてもよい。移動物体が他の移動物体と重なっていないと判定した場合には、移動物体の幾何学的重心を代表点として求め、移動物体が他の移動物体と重なっていることを検出した場合には、移動物体の動きベクトルに基づいて、重なりがないとしたときの幾何学的重心に相当する点を代表点として求めてもよい。
(もっと読む)
画像処理プログラム、画像処理装置、及び画像処理方法
【課題】 高速、かつ、高精度に対象画像内の所定の位置を検出する。
【解決手段】 グローバルパターン画像GPを構成する3枚のローカルパターン画像RP1〜RP3を記憶するパターン画像記憶部12と、ローカルパターン画像RP1〜RP3と原画像とのそれぞれの相関を示す相関値画像C1〜C3を生成する相関値画像生成部13と、相関値画像C1〜C3において相関の高い領域がグローバルパターン画像GPの中心Oに重なるように、相関値画像C1〜C3を移動させる移動部14と、相関値画像C1〜C3を重畳し、1枚の合成画像とする重畳部15と、合成画像から相関の高い領域検出し、対象画像内の所定の位置を検出する検出部16とを備える。
(もっと読む)
認証物の真贋を判定するコンピュータシステム。認証物
独自性を備えたアナログチップを備えた認証物と、第1情報処理部は、アナログチップを観測してチップ解析データ(Ka)を生成する複数の観測方法の内の少なくとも一つの観測方法を備えた観測部と、チップ解析データ(Ka)からチップ符号データ(F)を生成するアナログチップ符号化部を有し、第2情報処理部はチップデータ(Ta)を記憶するアナログチップデータベースと、このアナログチップデータベースから前記アナログチップ番号(T)に関連づけられた前記チップデータ(Ta)を読み出して、このチップデータ(Ta)と前記チップ符号データ(F)とを照合して真贋を判定する符号判定部と、アナログチップ番号(T)と判定結果とを関連付けて記憶する判定情報記憶部とを備えたことを特徴とする前記認証物の真贋判定システム。 (もっと読む)
距離算出方法及び撮像装置
【課題】 簡単なハードウェア構成で良好な距離の計算を行う。
【解決手段】 端子1X、1Yからの所望の座標と端子2X、2Yからの中心位置の座標が、減算器3X、3Y及び絶対値回路4X、4Yに供給されて座標上の距離値x、yが求められる。これらの距離値x、yが加算器5及び減算器6に供給され、この減算値が絶対値回路7を通じて乗算器8に供給されて端子9からの値b′が乗算される。また距離値xが上位に1ビットシフトされ、減算器10で距離値yが減算されて絶対値回路11に供給される。さらに距離値yが上位に1ビットシフトされ、減算器12で距離値xが減算されて絶対値回路13に供給される。これらの絶対値が加算器14で加算されて乗算器15で端子16からの値c′が乗算される。そして加算器5、乗算器8、15で求められた値が加算器17、18で加算され、算出された疑似距離の値d′が端子19に取り出される。
(もっと読む)
81 - 95 / 95
[ Back to top ]