
Fターム[5L096FA12]の内容
Fターム[5L096FA12]に分類される特許
101 - 115 / 115
図形認識方法及び装置及びプログラム

【課題】 画像の輪郭を正しい曲線形状で表現する。
【解決手段】 本発明は、輪郭を入力し、非線形平滑化を行い、折れ線近似を行い、曲線区間を作成する。全ての曲線区間について割り当て候補を生成し、全ての割り当て候補の要素について曲線パラメータを推定し、その結果に基づいて全ての割り当て候補の適応度を計算し、全ての曲線区間について隣接区間と重複のない割り当て候補を選択し、図形情報として出力する。
(もっと読む)
映像オブジェクト認識装置および認識方法、映像アノテーション付与装置および付与方法ならびにプログラム
オブジェクトの視覚的な特徴を数値化した情報である視覚的特徴情報と、オブジェクトに付加される情報である付加情報とをあらかじめ関連付けて記憶する。そして、映像の一部分の領域の映像データである部分映像データを抽出する。抽出した部分映像データの視覚的特徴情報を生成し、部分映像データの視覚的特徴情報と、記憶しているオブジェクトの視覚的特徴情報とを比較して類似度を算出する。算出した類似度に基づいて映像データに含まれるオブジェクトを特定し、特定したオブジェクトの付加情報によって構成されるアノテーションを映像に重畳して表示装置に表示させる。  (もっと読む)
(もっと読む)
画像認識システム、及び画像認識結果出力方法

【課題】 撮像した画像データにて認識された認識対象物を、実在する位置及び方向に即して表示することができる画像認識システム、及び画像認識結果出力方法を提供する。
【解決手段】 車両の外部を撮像する撮像装置と、該撮像装置で撮像した画像データを通信手段を介して取得し、画像認識処理を行い、出力する画像データを生成する画像処理装置と、該画像処理装置で生成した画像データを取得して出力する出力装置とを備える画像認識システムにおいて、画像処理装置は、撮像装置から取得した画像データ中の認識対象物を認識する手段と、認識された認識対象物の実在する位置及び方向を推定する手段とを備え、出力装置は、認識対象物が実在する位置及び方向に対応する情報を、運転時の視界の範囲内で表示する手段を備える。
(もっと読む)
自動形状分類の方法
2D形状を分類する方法は、類似形状群及び非類似形状群を備えた、対象形状の訓練データセットを作成する工程と、類似形状群から平均形状を計算する工程と、データベース内の形状全てを平均形状にアラインさせる工程と、その距離に基づいて2つのクラスタに形状を分類する工程とを備える。
 (もっと読む)
(もっと読む)
画像解析方法及び装置、画像処理方法及びシステム、これらの動作プログラム
【課題】 ホワイトボード領域や文書領域の外辺が歪曲している場合でも、正確かつ高速に四隅(角部)を検出できるようにする。
【解決手段】 被写体画像としてホワイトボードを含む解析対象画像から、ホワイトボードに由来するエッジを抽出して四角形的なエッジ画像を作成すると共にその角部に由来する4つの角部を別々に含む4つの画像に分割されるよう、第1〜第4の画像情報取得エリア9a〜9dを設定する。第1〜第4の画像情報取得エリア9a〜9dのそれぞれにおいて、分割エッジ画像に基づき前記角部を構成する水平方向の直線ha〜hd、及び垂直方向の直線va〜vdを検出し、これら直線の交点Qa〜Qdを求める。この交点Qa〜Qdを結ぶことで得られる矩形領域を、ホワイトボードに対応する特定領域として検出する。
(もっと読む)
特徴領域抽出装置、特徴領域抽出方法および特徴領域抽出プログラム
従来の画像検索においては検索精度が充分ではなかった。また、汎用性が高く高速に特徴的な部位を検索可能な手法が望まれていた。画像をドットマトリクス状の画素で表現した画像データを取得し、同画像データに基づいて画像のエッジ画素を検出し、同検出されたエッジ画素とその周囲の画素とで形成するパターンが所定の抽出対象に近い場合に当該エッジ画素を特徴点として抽出し、上記画像内で当該抽出した特徴点が多く分布する所定領域を特徴領域とする。  (もっと読む)
(もっと読む)
肺結節を検出するための候補の作成方法
三次元ボリュームデータ内に候補を作成するための方法は、標識された前景ボクセル(101)を含む三次元ボリュームデータの二値ボリューム画像を形成するステップと、二値ボリュームデータ(102)の標識された前景ボクセルの複数の形状特徴を推定するステップであって、二値ボリューム画像の前景ボクセルからピークボクセルおよび高曲率ボクセルを識別し、境界および各ピークボクセルについての複数の信頼値を蓄積し、複数の信頼値から信頼ピークを検出して信頼ピークを候補点であると決定するステップと、検出された信頼ピーク(103)を前提として候補点を精緻化し精緻化された候補点を候補であると決定するステップとを含む。  (もっと読む)
(もっと読む)
表面の生来の視覚的特徴を用いて3次元シーンにおける表面の追跡
対象表面の識別された透視イメージの中の対象表面の3次元位置及び向きを決定する装置が記載されている。対象表面は固有の視覚的特徴を有し、当該視覚的特徴のサブセットが選択される。該装置は、識別された透視イメージより時間的に前にある対象表面の透視イメージにおける選択された視覚的特徴の位置を用いて、識別された透視イメージの中の探索ゾーンを識別する。該装置は、選択された視覚的特徴を求めて識別された探索ゾーンを探索して、その選択された視覚的特徴が生じる2次元位置の決定する。決定された2次元位置に基づいて、該装置は、識別された透視イメージにおける対象表面の3次元位置及び向きを決定する。  (もっと読む)
(もっと読む)
計測システムおよび計測方法
【課題】 撮影手段の撮影条件に関するパラメータを、より容易に算出させる。
【解決手段】 計測領域内の道路上を直線的に移動ながら通過する試験車両5を、計測領域を撮影するカメラで撮影し、その試験車両5の撮影画像に基づいて、カメラの撮影条件に関するパラメータを算出するとともに、算出したパラメータを用いて車両の速度などを計測する。計測領域内の道路上を直線的に移動ながら通過する試験車両5の撮影画像を用いてパラメータを算出することができるため、予め道路上に基準物を設置する等の困難を要する作業を省くことができる。
(もっと読む)
グラフィカルオブジェクトの境界情報の処理
【課題】 グラフィカルオブジェクトの境界情報を処理する改良された方法を提供する。
【解決手段】 本発明にかかる方法は、少なくとも境界情報によって画定されるグラフィカルオブジェクトを含むグラフィカル画像(204)を受け取ること、境界情報から複数の頂点を決定すること、および少なくとも複数の頂点、グラフィカル画像、およびグラフィカル画像を解析することにより1組の頂点間の輪郭を検出するように働く所定の関数を利用して、近似された境界(206)を作成することを含むことができる。  (もっと読む)
(もっと読む)
紙片鑑別装置、紙片鑑別方法及びプログラム
画像処理部(18)は、光センサ部(13)によって得られた紙片画像データに対して斜行補正及び濃度補正を施す。辞書比較部(18)は、画像処理部(17)によって作成された紙片画像データと基準データ部(19)に格納されている各金種の基準データとから、各金種の比較用紙幣画像データを作成する。そして、該比較用紙幣画像データを辞書データ部(20)に格納されている同じ金種の辞書データとパターンマッチングしていく処理を全ての金種について行い、パターン間距離が最小の金種を紙片の金種とみなす。そして、その鑑別結果を記憶部(21)に格納する。 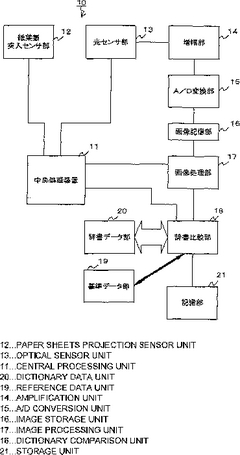 (もっと読む)
(もっと読む)
障害物認識方法及び障害物認識装置
【課題】ミリ波レーダ等の探査結果を利用することなく、撮像装置の自車前方の撮影画像から自車前方の衝突の可能性がある停止中の先行車等の静止状態の障害物を、自車の走行状態による誤認識が生じないようにして、確実に認識する。
【解決手段】自車1に搭載された単眼カメラ(撮像装置)3の自車前方の撮影画像の垂直エッジのヒストグラムを算出し、このヒストグラムのピーク点の軌跡のトラッキング画像を形成し、自車1の旋回半径から自車1の直進走行状態を検出したときに限り、前記ピーク点の軌跡の車幅方向の広がりの時間変化特性から衝突予測時間を算出し、この衝突予測時間に基づいて自車前方の衝突可能性がある静止状態の障害物を認識する。
(もっと読む)
画像照合装置及び方法
【課題】 登録画像と照合画像が一致しているかどうかを判定する。
【解決手段】 入力された登録画像から所定の方法により登録テンプレートを生成し、当該登録テンプレートと照合画像との一致度を検出し、当該検出結果から登録画像と照合画像のずれ量を検出し、検出されたずれ量から実際に両画像の一致度検出に用いる登録テンプレートを選択し、選択された登録テンプレートと照合画像とを比較照合し、一致度判定を行う。
(もっと読む)
隅部ピクセルをシードとして利用することにより凸状オブジェクトを検出する方法
画像からシードを選択することによって部位を確定する方法を提供する。この方法は画像中の2つのエリア間の境界を確定し;部位を確定するシードとしてのピクセルを識別する突出部によって特徴づけられる境界上のピクセルを選択し;選択されたピクセルの1つが既に確定された部位の一部でなければ、選択されたピクセルの1つから第2部位を画定するステップから成る。  (もっと読む)
(もっと読む)
有界三次元対象物の分類と空間ローカライゼーションのためのコンピュータ視覚システム
本発明は、有界三次元対象物の認識、分類、および空間ローカライゼーションのためのシステムと方法に関する。特には、対象物の認識、分類、およびローカライゼーションのためのコンピュータ化された方法に関する。本方法は、カメラにより記録された、または対象物のCAD表現を使用して構築された多数のトレーニング図に基づいて、トレーニングデータベースを生成することを含む。特徴的曲線は、トレーニング図から導出され、曲線のプリミティブが検出される。フィーチャの本質的および非本質的記述子が、対象物のクラスおよび図の姿勢状態に関するデータと共にデータベースに格納される。最終的には、認識は二段階で行われる。最初は、認識図の本質的記述子がデータベースの記述子と比較される。二番目に、最良の整合フィーチャから、どのフィーチャが、同じ姿勢状態にある同じ対象物クラスであることを示唆するという意味で、相互に一致するかが調べられる。 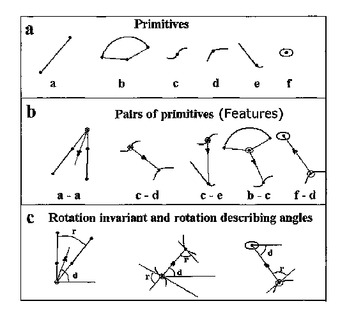 (もっと読む)
(もっと読む)
101 - 115 / 115
[ Back to top ]