
Fターム[5L096FA12]の内容
Fターム[5L096FA12]に分類される特許
41 - 60 / 115
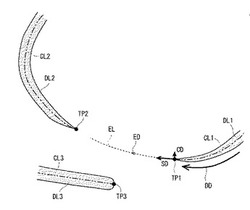
線画処理装置、線画処理方法およびプログラム
【課題】描画線に基づいた領域分離を高精度に実施することを容易とする技術を提供する。
【解決手段】線画処理装置100は、線画から芯線CL1を抽出する芯線抽出部21と、芯線CL1の端点TP1を抽出する端点抽出部22と、端点TP1から延長線ELを延伸させる延伸方向EDとして、前記端点まで続く芯線CL1の描画方向DDに基づいて、端点TP1から射出させる射出方向SDと、射出方向SDに射出された延長線EDを所定方向に湾曲させる湾曲方向CDとを決定する延伸方向決定部24とを備える。
(もっと読む)
マルチスケールの有向パッチ(MULTI−SCALEORIENTEDPATCHES)を使用したマルチ画像特徴(FEATURE)のマッチング

【課題】場面の複数の画像間で対応するポイントを特定するためのシステムおよびプロセスを提供すること。
【解決手段】本システムおよびプロセスには、不変の特徴の新しいクラスに基づくマルチビューマッチングフレームワークが含まれる。特徴は、ぼかし局所勾配を使用してスケール空間(scale−space)内に向きを指定してハリスのコーナーに配置される。これで、特徴記述子をサンプリングする類似性不変フレーム(similarityinvariant frame)が定義される。実際に構成される記述子は、輝度値のバイアス/ゲイン標準化パッチである。マッチングは、低周波数のハールのウェーブレット係数のインデックスを使用する高速の最近傍の手順で実行される。パッチのマッチングを行う6パラメータの場面プルなモデルを使用して、正しい一致と誤った一致に関するノイズ統計を分析する。この結果、特徴ごとのアウトライアの距離に基づく場面プルな一致検証手順が得られる。
(もっと読む)
画像処理装置及びプログラム
【課題】簡易な計算で、エッジデータのフィルタリング、補完、及び特徴抽出を行う。
【解決手段】エッジデータの各点に対して計算窓を設定し、エッジデータで表されたエッジを近似するNc次の関数の基底関数を表す行列B、及び計算窓内のエッジデータに対する重み行列Wで表され、かつNc次の関数の次数と同数の行数及び窓内の点の個数と同数の列数で表される行列Mを設定する。エッジデータの点毎に、行列Mの各行の要素と計算窓内の列で表されたエッジデータとの内積の各々を計算し、行列Mの1行目との窓内の列で表されたエッジデータとの内積をフィルタリング後のエッジデータとして、及び行列Mの(n+1)行目と窓内の列で表されたエッジデータとの内積をフィルタリング後のエッジデータのn次微分として出力する。また、フィルタリング後のエッジデータのn次微分を用いてエッジの特徴を抽出する。
(もっと読む)
物体認識方法及び物体認識装置
【課題】予め登録しておくモデルデータのデータ量を抑制しながら、対象物の位置や姿勢を迅速に求めることができる物体認識方法及び物体認識装置を提供する。
【解決手段】距離センサ1により、対象物201を含む所定領域内の各点までの距離計測を行い、三次元物体認識手段3により、これら各点の計測データをメッシュデータ化し、このメッシュデータのグルーピングを行って複数のメッシュグループとし、各メッシュグループの法線ベクトルに垂直な投影平面を作成し、各メッシュグループを対応する投影平面に投影した投影データを求め、投影データの輪郭データを抽出して、輪郭データと対象物の二次元形状データとを比較して、対象物の位置及び姿勢を認識する。
(もっと読む)
画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法
【課題】画像から所定の物体または図柄を高い精度で検出できるようにすること。
【解決手段】まず、画像から、物体または図柄の輪郭の複数の頂点を検出する。そして、検出された複数の頂点を結ぶ各辺上に、少なくとも1組の対向する2辺の各辺を不均等に分割するように所定数の分割点を生成する。そして、対向する2辺上の分割点を互いに結んだ直線に基づいて複数のサンプル点を決定し、これらのサンプル点の画素値に基づいて、上記画像における上記複数の頂点で囲まれた領域に所定の物体または図柄が表示されているか否かを判別する。
(もっと読む)
画像認識プログラム、画像認識装置、画像認識システム、および画像認識方法
【課題】画像から所定の物体または図柄を高い精度で検出できるようにすること。
【解決手段】まず、或る画像から輪郭または頂点が検出されたか否かを判定する。そして、或る画像から輪郭または頂点が検出されたと判定された場合には、当該画像における、当該画像から検出された輪郭または頂点によって囲まれる領域に対してパターンマッチング処理を行う。そして、当該領域に所定物体または所定図柄が表示されていると判定された場合には、当該領域に関連する位置を示す検出位置情報を記憶領域に記憶する。一方、上記の或る画像から輪郭または頂点が検出されなかったと判定された場合には、記憶領域に記憶されている検出位置情報に基づいて、当該画像に対してパターンマッチング処理を行う。
(もっと読む)
HDRカメラを用いた相対運動の決定方法
画像センサを含む画像記録システム(HDRカメラ)により対象物の運動を検出するための方法および装置であって、画像センサの露光中に第1のリセットと第2のリセットを時間間隔をおいて実行し(HDRでの原理制限)、対象物の結像から明度が一定の領域の広がりを測定し、当該広がりと、第1と第2のリセットの時間間隔との比から、前記対象物の運動(方向、速度および場合により加速度)を求める。この運動決定はただ1つの画像によって可能となる。  (もっと読む)
(もっと読む)
マスク着用判定装置
【課題】ひとがマスクを着用しているか否かを精度良く判定する。
【解決手段】マスク着用判定装置10は、乗員カメラ11から出力された顔画像において水平エッジを抽出する水平エッジ抽出部21と、水平エッジの抽出結果のうちから、輝度値判定部22により水平エッジの輝度値が第1輝度値以上であると判定され、かつ、水平エッジの水平方向長さが所定値以上または水平エッジの鉛直方向高さと水平方向幅との比が所定比以下である水平エッジを選択する水平エッジ選択部23と、選択された水平エッジよりも上下方向下方の所定領域の輝度値が第2輝度値以上である場合に、ひとがマスクを着用していると判定するマスク着用判定部24とを備える。
(もっと読む)
マップ作成方法および装置とそのマップを利用した定位方法
【課題】レンジデータと画像特徴点とを連合させるマップ作成および定位方法を提供し、作成された環境デジタルマップをパーソナルナビゲーション装置(PND)にも提供できるようにする。
【解決手段】マップ作成方法が提供される。環境が走査されて環境障害物の深さ情報を獲得する。環境の画像が捕捉されて画像平面が生成される。環境障害物の深さ情報が画像平面に投影されて、投影位置を獲得する。少なくとも1つの特徴ベクトルが、画像平面中の各投影位置周辺の予め決定された範囲から計算される。環境障害物の深さ情報および特徴ベクトルが合併されて、一時点に対するサブマップが生成される。全時点でのサブマップが連合されてマップを生成する。また、マップを使用する定位方法も提供される。
(もっと読む)
図形形状認識装置、図形形状認識方法、およびプログラム
【課題】高速な図形の形状認識を行い、さらに並列処理に最適な領域単位で処理することでより高速な図形の形状認識を行う図形形状認識方法および図形形状認識装置を提供することを目的とする。
【解決手段】図形形状認識装置10は、画像データ取り込み部101と、二値化処理部102と、エッジ処理部103と、複数の特徴点判定処理部110(a,b,c・・・)と、特徴点集合記憶部117と、複数の頂点候補判定処理部120(a,b,c・・・)と、頂点候補集合記憶部127と、複数の図形形状認識処理部130(a,b,c・・・)と、頂点集合記憶部137と、画像出力部140とから構成されている。また、図形形状認識装置10には、カメラ11と、画像表示装置13が接続されている。
(もっと読む)
画像探索方法
【課題】高速且つ精度良く対象物を探索する。
【解決手段】二つの特徴点からなる基底ペアの始点となる特徴点を中心して輪郭線の境界追跡を行い、輪郭線に沿った各位置でのエッジ勾配ベクトルの方向の差が規定範囲以下となる安定区間を探す工程と、安定区間と基底ペアの始点との相対位置関係と、安定区間のエッジ勾配ベクトルと基底ベクトルの相対角度と、基底ペアの始点と終点の相対位置関係とを含む基底ペア情報を求める工程と、被探索画像の各特徴点を基底ペアの始点と仮定し、基底ペア情報に基づいて、基底ペア終点の被探索画像上での座標位置を予測する工程と、予測される基底ペアの終点の座標位置に基づいて基底ペアの終点に該当する特徴点を探索する工程と、基底ペアの終点の探索結果に基づいて、基底ペアの始点と見なして被探索画像の各特徴点と基準座標点群との照合を行う特徴点の絞り込みを行う。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】 図形、その図形に対応する数字、及び引出線を有する画像から引出線を高速かつ高精度に検出する。
【解決手段】 図形と、その図形に対応する数字と、それらを対応付ける引出線とを有する図領域32の画像から数字を検出する数字領域検出手段302と、前記画像から線の端点及び線の交点を検出するコーナー検出手段304と、コーナー検出手段304で検出された交点を前回画像から除去することで、前記図形を要素に分解する分解手段306と、数字領域検出手段302、コーナー検出手段304、及び分解手段306の出力に基づいて、引出線を検出する引出線判定手段308とを備えている。引出線が図形と重なっていても、交点を削除してから引出線を検出するので、正確に引出線を検出できる。また、引出線の端点を検出し、引出線の端点を一端とする要素を引出線として検出するので、全面にハフ変換を施すことに比べると、少ない計算量で処理が可能である。
(もっと読む)
画像特徴点抽出方法
【課題】各種オペレータを用いて得ることができる特徴点から、不要に抽出された点を排除し、マッチング処理の対応付け等に用いる特徴点を、対象物の変動に追随して同じように変動していく、マッチング用モデルとの形状誤差が少なく、対応付けの容易な不変性の高い点に絞込んで、マッチング処理を精度よく、且つ高速に行う。
【解決手段】画像データから特徴点を抽出するための画像特徴点抽出方法において、画像を変動させて複数枚の画像データを取得し、各画像データごとに特徴点を抽出し、抽出した特徴点の変動前の画像データにおける位置を求め、画像変動に追随して抽出される特徴点のみを選択し、他の点を排除する。
(もっと読む)
画像認識装置および操作判定方法並びにプログラム
【課題】的確な操作の判定を可能にすること。
【解決手段】画像読取部301においてビデオカメラ201で撮影されたデータを読取り(S401)、そのデータから操作者の像を、画像抽出部302により抽出する(S402)。このような準備の結果、抽出した操作者102の画像に基づいて仮想操作面および操作領域を形成する(S403)。大人の操作者810については、身長(視線の位置)や腕の長さを考慮して操作領域811のように形成することができるし、子供の操作者820の場合、身長もより低くなり、腕も短くなるので、これにあわせて操作領域821を設定することができる。
(もっと読む)
スキャンされた文書画像内の前景画素群の連結グループをマーキング種類に基づき分類する方法及びシステム
【課題】文書内の画像上のマーキングをマーキング種類に従って分類する。
【解決手段】
画像を含んだ文書を区分器112aに供給する。区分器112aは、連結成分を見つけることで、その画像を、同じマーキング種類である可能性が高いと識別される前景画素構造の複数の断片へと分割し、横方向に近い罫線及び縦方向に近い罫線を削除し、いくつかの連結成分を更に分割することで断片群を求める。分類器112bは各断片についてのカテゴリスコアを求める。ここで分類器112bは各画素が既知のマーキング種類に従ってラベル付けされているグランドトゥルース画像群により学習したものである。断片が分類器112bにより分類されると、その断片に含まれるすべての画素に同じラベルを割り当てられる。
(もっと読む)
画像処理装置、撮像装置、画像処理方法
【課題】 画像中の顔の表情やその顔が誰のものであるかを判別することで、適切な画像を記録する。
【解決手段】 画像を入力し(S201)、入力された画像を一時的に保持し、保持された画像から顔を検出し(S202)、顔が検出された場合に顔の表情を判別し(S204)、判別された顔の表情が特定の表情である場合に、一時的に保持された当該顔が検出された画像を記録する(S205)。
(もっと読む)
3次元における形状の一致を判定する方法および装置
【課題】3次元における形状の一致を判定する方法および装置において、立体的形状に関する情報を有効に利用できるものを提供する。
【解決手段】判定装置10のカメラ制御手段33は、距離画像カメラ20によって判定対象の物体の距離画像を撮影する。特徴点抽出手段34は、この距離画像に基づいて特徴点を抽出する。特徴量決定手段35は、特徴点近傍の立体的形状を表面点の深さとして算出し、表面点の深さに基づいて特徴点の特徴量を決定する。一致判定手段36は、2つの形状の特徴量に基づき、これらの形状の一致を判定する。
(もっと読む)
画像処理装置、画像読取装置、画像形成装置及びプログラム
【課題】セル領域が罫線で区切られていない表が含まれている場合にも、画像から表領域を精度よく抽出する。
【解決手段】画像処理部は、入力画像から連結成分に応じたオブジェクトを判別し、各々のオブジェクトの外接矩形の辺の端点から見て、そのオブジェクトと隣り合うオブジェクトにおいてその辺と対向する辺の端点が所定の範囲内にある場合には、それらの端点に角リンクを付与する。そして、隣り合うオブジェクトとオブジェクトとにおいて、対応する端点同士に角リンクが付与されている場合には、その隣り合うオブジェクト同士を統合して統合オブジェクトとし、統合オブジェクトのオブジェクト間の結合の強さを示すスコアを角リンクに基づいて算出し、算出されたスコアがその統合オブジェクトに含まれるオブジェクトの数に応じた閾値以上である場合には、その統合オブジェクトの領域を表領域として抽出する。
(もっと読む)
画像処理装置及び画像処理プログラム
【課題】対象物の過検出を抑え、対象物の検出精度を向上させる。
【解決手段】画像処理装置100は、複数の識別器を用い、処理対象の画像から対象物を含む可能性のある領域を注目領域として検出する識別部110と、前記注目領域から所定の特徴を検出し、前記所定の特徴の位置(以下、「特徴位置」という。)及び前記所定の特徴の量(以下、「特徴量」という。)を抽出する特徴抽出部120と、前記注目領域における前記特徴位置及び前記特徴量に基づき前記注目領域が前記対象物を含むか否かを判定する判定部150と、を備える。
(もっと読む)
車両周辺監視装置
【課題】物体の大きさに関わらず自車と衝突する可能性のある障害物があるか否かの判定を正しく行う事ができ、また、物体の中心が動いた場合でも、物体内の輝度の変化が大きい場合でも正しく判定を行うことができる車両周辺監視装置を得る。
【解決手段】撮影された画像からエッジ抽出により物体を抽出する物体抽出手段200と、該物体抽出手段200により抽出された物体の上下左右端を検出する検出手段201と、該検出手段201により検出された物体の上下左右端と保持している前フレームにおける物体の上下左右端を比較することにより上記物体の上下左右端の移動方向を算出する算出手段206と、該算出手段206により算出された物体の上下左右端の移動方向がそれぞれ上下左右方向に移動している場合に、上記物体を自車と衝突の可能性が高い障害物候補と判定する接近判定手段211とを備えた。
(もっと読む)
41 - 60 / 115
[ Back to top ]