
Fターム[5L096FA37]の内容
Fターム[5L096FA37]に分類される特許
1 - 20 / 263
物体検出装置、監視カメラ、及び物体検出方法
画像処理装置、画像処理方法
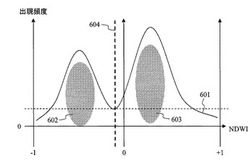
【課題】波長帯の異なる領域を抽出するための閾値を自動的に決定する。
【解決手段】高空から撮影した地理画像データにおける画素において、第1の波長帯の分光輝度値と、記第1の波長帯とは異なる第2の波長帯の分光輝度値と、に基づいて画素を識別するための正規化指標値を演算する正規化指標演算部と、各画素における前記正規化指標値と出現頻度との関係を求め、クラス内分散とクラス間分散の比である分離度が最大となる正規化指標値を判別分析法により求め、前記画素を識別するための閾値として決定する閾値決定部と、前記閾値と対応する正規化指標値に基づいて、前記第1及び第2の波長帯により区別される画像データの領域を抽出する領域抽出部と、を有することを特徴とする画像処理装置。
(もっと読む)
画像処理方法及び画像処理装置

【課題】着目する特性を精度良く抽出し、一定の評価基準によって製品の品質評価を行うことが可能な画像処理方法等を提供する。
【解決手段】画像処理装置1は、分布算出部31、閾値決定部32、特性分離部33、及び計測部34の機能を備える。分布算出部31は、入力画像21を入力とし、画素値分布22及び画素値変化率分布23を出力する。閾値決定部32は、画素値分布22に基づく値を入力とする人工知能的アルゴリズムによって、閾値24を出力する。特性分離部33は、画素値分布22、画素値変化率分布23、及び閾値24を入力とし、これらを用いて入力画像21の領域を特性ごとの領域に分離し、特性領域25を出力する。計測部34は、特性領域25を入力し、特性領域25に基づいて計測処理を行い、計測結果26を出力する。
(もっと読む)
物体検出方法及び物体検出装置
【課題】演算コストがより低い物体検出装置を提供すること。
【解決手段】2つのカメラ2a、2bのそれぞれが撮像するカメラ画像2aR、2bRの視差に基づいて物体50を検出する物体検出装置100は、被撮像空間を通る仮想直線VL上の複数の検査点IP1〜IP5のうちの1つIP1に対応する画素を含む部分画像2aR1、2bR1をカメラ画像2aR、2bRから抽出する部分画像抽出部10と、同一の検査点IP1に対応するカメラ画像2aR、2bRの部分画像2aR1、2bR1同士の類似度に基づいて検査点IP1に関する評価値CGRAを決定する評価値決定部11と、評価値決定部11が決定する評価値を用いて物体50の存否を判定する物体存否判定部12とを備える。
(もっと読む)
箱詰め物検査方法および箱詰め物検査装置
【課題】箱詰めされる物品の種類、形状、重量などを問わず、物品や仕切板の欠落など、種々の箱詰め不良を非接触で検出することを可能とする。
【解決手段】複数個のガラスびん1が整列された状態で箱詰めされる箱詰め物12の箱詰め状態を検査する。準備工程では適正な箱詰め状態の箱詰め物12を撮像して得られる基準画像について各ガラスびん1が整列配置される位置に検査領域をそれぞれ設定して、各検査領域内の基準画像についての濃度分布に関する情報を抽出することにより検査領域毎の基準となる情報を取得する。検査工程では検査対象の箱詰め物12を撮像して得られる検査対象画像について各ガラスびんが整列配置される位置に検査領域をそれぞれ設定して、各検査領域内の検査対象画像についての濃度分布に関する検査情報を抽出した後、各検査情報を前記基準となる情報と対比して箱詰め状態の適否を判別する。
(もっと読む)
画像処理装置、画像処理方法、および、プログラム
【課題】誤検出を抑制した、頑強な不動体検出を行う。
【解決手段】取得される映像から、多項分布の背景モデルを生成し、背景を生成する生成部と、生成部により生成された背景モデルから、信頼度の高い背景が生成できるか否かを判断する判断部を備え、現画像において、生成される背景とは異なる部分の画像である動体が検出され、動体が、所定の一定時間以上停止しているかどうかが判定される。一定時間以上停止している動体である一時停止オブジェクトが映る一時停止画像と、現画像とが用いられて、現画像の画素について、所定の時間以上変化がない、背景とは異なる不動体であることの確からしさを表す不動体信頼度が求められる。求められた不動体信頼度に基づいて、現画像から、不動体が検出される。本技術は、例えば、物体の置き去りや持ち去り等を検出する不動体の検出に適用できる。
(もっと読む)
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】検出対象エッジに対して類似形状の非検出対象エッジを持つような状況下で照明の変化が起こった場合でも、検出対象エッジのみを安定して検出することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】サンプリング領域毎の平均輝度値に基づいて特徴量を設定し、エッジ選択のための閾値を特徴量ヒストグラムから求め、求めた閾値と、予め記憶しておいた検出対象エッジ、非検出対象エッジの特徴量との相対関係に基づき、検出対象エッジのみを選択する。このように、検出対象ワークの入力画像に対し、毎回エッジ特徴量を計算して、検出対象エッジと非検出対象エッジを分離するための特徴量の閾値を動的に算出できるので、照明装置の劣化等が原因で入力画像内の輝度変動が大きくなった場合でも、安定して検出対象エッジと非検出対象エッジとを分離し、的確に検出することができる。
(もっと読む)
画像の類似性評価装置及びその評価方法
【課題】対比する画像が類似しているか類似していないかを評価する。
【解決手段】画像を入力する画像入力装置10と、画像入力装置10によって入力した画像を記憶する画像記憶部20と、画像記憶部20から複数の画像を取得して色変換しそれぞれの画像を柄画像と色画像に分離する色変換部30と、色変換部30によって分離した柄画像と色画像のそれぞれについて、画像の周期性、画像の輝度分布、画像の乱雑さ、画像の連続量、画像の一致確率のうちの少なくともいずれか1つに関する種類の特徴量を抽出する特徴量抽出部40と、対比する2枚の画像の柄画像と色画像の各々について抽出した特徴量を特徴量抽出部40から取得し2枚の柄画像間の特徴量の差と2枚の色画像間の特徴量の差に基づいて画像の類似性を評価する類似性評価部50と、を有する。
(もっと読む)
画像処理ユニット、および画像処理プログラム
【課題】生成する背景差分画像の精度の低下を抑えるとともに、装置本体にかかる処理負荷の増大も抑え、装置本体のコストダウンを図った画像処理ユニットを提供する。
【解決手段】メモリ4aは、代表画素毎に、その代表画素の特徴と、その代表画素の画素値の発生頻度をモデル化した背景モデルと、を関連付けて記憶する。画像処理部4は、画像入力部3に入力されたフレーム画像の画素毎に、その画素の特徴に対応する代表画素の背景モデルを探索する。画像処理部4は、この探索で得た背景モデルに基づき、背景が撮像されている背景画素、または背景でない物体が撮像されている前景画素のいずれであるかを判定する。画像処理部4は、画像入力部3に入力されたフレーム画像のいずれかの画素において、その画素が背景画素、または前景画素のいずれであるかの判定に用いた背景モデルを、この背景モデルを用いた画素の画素値に基づいて更新する。
(もっと読む)
画像処理方法、画像処理装置及び画像処理プログラム、並びに、画像処理による放射線量推定方法
【課題】撮影画像内の点や短い線や被写体のコーナーなどの凸部分を特徴点として安定・的確に抽出することができるようにする。
【解決手段】元画像内の着目点と当該着目点から角度θ方向に距離dだけ離れた点との2画素の画素値の対の出現度数を用いて方向別の濃度共起ヒストグラムを作成するステップ(S2)と、当該方向別の濃度共起ヒストグラムの要素の出現確率を算出するステップ(S3)と、当該方向別ヒストグラム要素出現確率を用いて方向別自己エントロピの計算を行うステップ(S4)と、元画像の画素値を対応する方向別自己エントロピの値に置換することによって方向別自己エントロピ画像を作成するステップ(S5)と、当該方向別自己エントロピ画像を用いて特徴画像として総乗画像と総和画像とのうちの少なくとも一方を作成するステップ(S6,S7)とを有するようにした。
(もっと読む)
画像処理装置、撮像装置およびプログラム
【課題】主要被写体が好ましい態様で写っている画像を抽出する。
【解決手段】画像処理装置であって、複数の画像を取得する画像取得部と、複数の画像における主要被写体を推定する主要被写体推定部と、複数の画像のそれぞれについて、視覚的な顕著度を算出する顕著度算出部と、複数の画像の間で主要被写体の顕著度を比較し、主要被写体の顕著度に基づいて複数の画像のうちのいずれかの画像を選択する画像選択部とを備える。上記画像処理装置において、画像選択部は、複数の画像のそれぞれにおける主要被写体の顕著度がより大きい場合に当該画像を選択してもよい。
(もっと読む)
並列演算装置及びマイクロコンピュータ
【課題】並列的に入力されるデータに対処してヒストグラムの度数データを生成することができ、ヒストグラムの度数データを生成する処理時間をその入力データにおけるヒストグラム値の分布状況に依存せず、更にはヒストグラムの度数データを累積するために用いる記憶領域を少なくすることができる並列演算装置を提供する。
【解決手段】複数のプロセッサによる並列的な演算結果に対して、演算結果の種別毎にそのデータ数を並列的に計数する複数のカウンタを有し、夫々のカウンタの計数値を累積してヒストグラムの度数とするヒストグラムカウンタ回路を備える。
(もっと読む)
画像処理方法、画像処理装置及びスキャナ
【課題】特定のオブジェクトの境界の内側にある、画像における領域を確保し、これにより特定のオブジェクト手の領域、即ち別のオブジェクトを画像から間接的に除く。
【解決手段】画像処理方法は、画像における前景のオブジェクトのエッジマップを決定するエッジマップ決定手段、エッジマップから境界線の候補を取得し、境界線の候補のうちで、前景のオブジェクトにおける特定のオブジェクトの境界を定義する境界線を決定する境界線決定手段、及び特定のオブジェクト以外の前記境界線を超える前記前景のオブジェクトを除く除去手段を備える。この方法は、特定のオブジェクトの境界を越えて捕捉された画像における、例えば手のような別のオブジェクトの画像を除去することに適用される。本発明の実施の形態に係る画像処理方法によれば、画像における特定のオブジェクトの境界は、正確に決定され、これにより境界を越える別のオブジェクトを除去して、その後の他の画像処理を容易にすることができる。
(もっと読む)
物体領域検出装置、物体領域検出方法、及び物体領域検出プログラム
【課題】前景画像を撮像した実環境に応じて対象物体を示す物体領域を検出する。
【解決手段】物体領域検出装置は、前景画像データにおける照明条件に基づいて定められた変換領域と、該変換領域に対応付けられた表色系とを示すマスク情報に基づいて、前景画像データが示す画像における表色系を変換し、表色系が変換された前景画像データの色分布に基づいて、検出対象となる対象物体が撮像されていない背景画像データ及び前記前景画像データが示す画像を複数の部分領域に分割し、複数の部分領域ごとに、前景画像データ及び背景画像データそれぞれのヒストグラムを算出して、該部分領域に対応する前景画像データ及び背景画像データのヒストグラムの類似度に基づいて、前記対象物体が存在するか否かを判定し、前景画像データのうち、前記対象物体が存在すると判定された部分領域に対応する画像データを出力する。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】ブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】ブロック画像を分離平面を用いてカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、ブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13とを備え、特徴量演算部12は、当該ブロック画像の局所的特徴量及び対象画像全体の全体特徴量を用いるとともに、ブロック画像の複数の特徴を座標軸とする第2特徴量空間において、複数の局所的特徴量を組み合わせてなる特徴量ベクトルの座標位置と、第2特徴量空間の一つ又は複数の任意の領域とを用いて、領域に属する特徴量ベクトルを有するブロック画像を領域ごとにカウントしたブロック画像の数を全体特徴量に含める。
(もっと読む)
特徴点位置決定装置、特徴点位置決定方法及びプログラム
【課題】処理高速化等のために検出された特徴点位置候補の精度が低い場合であっても妥当な特徴点位置補正を実現し、所望の特徴点位置を決定できるようにする。
【解決手段】画像データから複数の特徴点の位置を決定する特徴点位置決定装置であって、特徴点の候補位置を求める特徴点位置候補決定手段と、前記特徴点位置候補決定手段で得られた特徴点位置候補の信頼度を判定する信頼度判定手段と、前記特徴点位置候補決定手段の結果を所定の補正条件に基づいて補正する特徴点位置補正手段を有し、前記信頼度判定手段の結果に基づいて前記補正条件を決定することを特徴とする。
(もっと読む)
画像識別装置、画像識別方法、画像識別プログラム及び記録媒体
【課題】対象画像を分割して得られるブロック画像の分類精度を向上させることができる画像識別装置を提供する。
【解決手段】予め設定されたカテゴリごとに予め学習済みの分離平面を用いて対象画像を分割して得られるブロック画像をカテゴリに分類する画像識別装置1であって、対象画像を入力する対象画像入力部10と、対象画像を複数のブロックに分割して複数のブロック画像を生成するブロック画像生成部11と、ブロック画像の特徴量を演算する特徴量演算部12と、特徴量空間におけるブロック画像の特徴量の大きさに対応する座標位置及び分離平面を用いて、ブロック画像がカテゴリに分類されるか否かを判別するカテゴリ判別部13と、を備え、特徴量演算部12は、ブロック画像の特徴量として、当該ブロック画像の画像情報から算出される局所的特徴量及び対象画像全体の画像情報から算出される全体特徴量を用いる。
(もっと読む)
車載カメラシステム
【課題】車室内外の環境条件によって車両の窓ガラスに生じる曇りを的確に判定可能な車載カメラシステムを提供する。
【解決手段】本発明に係る車載カメラシステム(1)は、車両の窓ガラス(2)に生じる曇りを検知するものであり、画像処理装置(6)は、窓ガラス(2)を介して車室外を撮像する撮像装置(3)で撮像した画像から窓ガラスに曇りが生じているか否かを判定し、曇りが生じていると判定された場合は、車室内温度センサ(4)及び車室外温度センサ(9)で計測した温度に基づいて窓ガラスのうち車室内外のいずれ側に曇りが生じているかを判定することを特徴とする。
(もっと読む)
食事画像解析方法、食事画像解析プログラムおよび食事画像解析装置
【課題】食事のバランスを容易にユーザに把握させることを課題とする。
【解決手段】食事画像解析装置10の取得部13aは、食事画像を取得する。そして、抽出部13bは、食事画像から器の位置を検出し、食事部分のみを抽出する。続いて、作成部13cは、食材画像の画素値を色ごとに分類し、食材画像の色頻度分布を作成する。そして、色算出部13dは、色種類数および色割合を算出する。続いて、スコア算出部13eは、色種類数および色割合に基づいて、スコアを算出する。その後、出力部12は、算出されたスコアを出力する。
(もっと読む)
画像処理装置及びプログラム
【課題】画像に基づいてその画像の撮影シーンが夕景又は朝景の撮影シーンであるかを高速かつ正確に判定できるようにする。
【解決手段】撮影シーン判定部18は、撮像部7から取り込んだスルー画像の全体を複数の画像領域に分割した画像領域毎に、その分割領域の画像に基づいてヒストグラムを生成する。そして、撮影シーン判定部18は、このヒストグラム全体に対してその所定ビンの度数の割合を画像領域毎に算出し、その割合に基づいて夕景又は朝景の撮影シーンであるか否かを画像領域毎に個別に判定した後、画像領域毎に判定した判定結果を総合し、その総合結果に基づいてスルー画像全体が夕景又は朝景の撮影シーンであるか否かを判定する。
(もっと読む)
1 - 20 / 263
[ Back to top ]