
Fターム[5L096FA38]の内容
Fターム[5L096FA38]に分類される特許
1 - 20 / 104
画像ワープ方法及びそのコンピュータプログラム製品

【課題】画像ワープ方法及びそのコンピュータプログラム製品を提供する。
【解決手段】この画像ワープ方法は、元の視線角に対応する元の画像の複数の元の特徴点を決定するステップと、該元の画像内の該複数の元の特徴点の元の画素座標を計算するステップと、該複数の元の特徴点にそれぞれ対応する該元の画像の複数の新しい特徴点を決定するステップと、該元の画像上に射影された該複数の新しい特徴点の新しい画素座標を計算するステップと、該元の画像内の該元の特徴点の該元の画素座標をそれぞれ対応する該新しい特徴点の該新しい画素座標に近づけて、該元の画像を新しい視線角に対応する新しい画像に変形させるステップとを含む。
(もっと読む)
マーク検出方法

【課題】 検出対象であるマークのエッジを正確に検出することが可能なマーク検出方法を提供する。
【解決手段】 Y方向に延びる直線状のマークを含む二次元画像を、X方向に微分した後、Y方向に射影加算する工程と、射影加算時におけるY方向に存在するエッジの数をX方向の領域毎に検出するエッジ数検出工程と、エッジ数検出工程で検出したX方向の領域毎のエッジの数が設定値以下のときに射影加算後のX方向の領域毎の加算値を減少させる加算値補正工程と、加算値補正工程により補正した射影加算後のX方向の領域毎の加算値に基づいて直線状のマークのエッジを検出するエッジ検出工程とを備える。
(もっと読む)
3次元形状推定装置、3次元形状推定方法及び3次元形状推定プログラム
【課題】3次元形状の推定を行うことができる3次元形状推定装置を提供する。
【解決手段】空間の異なる位置から対象物体を撮影する多視点カメラによって撮像した画像から、対象物体の3次元形状を推定する3次元形状推定装置であって、多視点マルチカメラによって撮像した背景画像及び前景画像を入力する手段と、対象物体を含む3次元空間全体をボクセルに分割する手段と、ボクセルを背景画像及び前景画像に投影し、対象物体に含まれる第1の尤度を計算する手段と、ボクセルのそれぞれについて、隣接するボクセルとの間に対象物体の境界面が存在する第2の尤度を計算する手段と、第1の尤度及び第2の尤度を重み係数とする枝をボクセル毎に定義し、グラフを構築する手段と、構築されたグラフに対し、最小グラフカットを計算することにより対象となるボクセル集合を計算する手段と、ボクセル集合を対象物体の3次元形状情報として出力する手段とを備えた。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より精度よく高速にグローバル動きベクトルを求めることができるようにする。
【解決手段】グローバル動きベクトル予測部は、過去の撮像画像のグローバル動きベクトルから、処理対象のフレームの撮像画像のグローバル動きベクトルの予測値を算出し、有効領域算出部は、その予測値に基づいて、撮像画像上の有効領域を定める。局所特徴量算出部は、撮像画像上の有効領域から局所特徴量を抽出し、積分射影部は、抽出された局所特徴量を所定方向の軸に射影することで、射影特徴ベクトルを算出する。グローバル動きベクトル算出部は、連続する2つのフレームの射影特徴ベクトルのマッチング処理を行うことにより、グローバル動きベクトルを算出する。本発明は、撮像装置に適用することができる。
(もっと読む)
画像処理装置および方法、並びにプログラム
【課題】より精度よく高速にグローバル動きベクトルを求めることができるようにする。
【解決手段】解像度変換部は、撮像画像を解像度の異なる複数の縮小画像に変換し、局所特徴量算出部は、各縮小画像から局所特徴量を算出する。積分射影部は、抽出された局所特徴量を所定方向の軸に射影することで射影特徴ベクトルを算出し、グローバル動きベクトル算出部は、連続する2つのフレームの射影特徴ベクトルのマッチング処理を行うことにより、撮像画像の解像度ごとにグローバル動きベクトルを算出する。また、信頼度算出部は、射影特徴ベクトルに基づいてグローバル動きベクトルの信頼度を算出する。グローバル動きベクトル選択部は、信頼度に基づいてグローバル動きベクトルを選択する。本発明は、撮像装置に適用することができる。
(もっと読む)
画像分類方法
【課題】形容詞によって画像を分類する画像分類方法を提供する。
【解決手段】少なくとも1つの色面に関する画像を入力する画像入力ステップと、前記画像の画素値の分布関数を作成する分布関数作成ステップと、前記分布関数を用いて、空間分布の重心位置と、慣性テンソルの各々を求めて、空間的な形状因子を記述する空間因子記述ステップと、前記画像をy軸方向に関して画素値の平均をとってx軸に射影した一次元画像A(x)と、y軸に射影した一次元画像A(y)とを算出する一次元画像作成ステップと、画素値の明るさ方向の因子を記述する明るさ因子記述ステップと、前記空間因子記述ステップと前記明るさ因子記述ステップで求めた各々の量から明るさ因子に関する2次形式の物理量の各々を算出する物理量算出ステップと、前記算出された少なくとも1つの物理量に基づいて、前記画像を少なくとも2つの範疇の画像に分類する分類ステップとを備える。
(もっと読む)
特徴点位置決定装置、特徴点位置決定方法及びプログラム
【課題】処理高速化等のために検出された特徴点位置候補の精度が低い場合であっても妥当な特徴点位置補正を実現し、所望の特徴点位置を決定できるようにする。
【解決手段】画像データから複数の特徴点の位置を決定する特徴点位置決定装置であって、特徴点の候補位置を求める特徴点位置候補決定手段と、前記特徴点位置候補決定手段で得られた特徴点位置候補の信頼度を判定する信頼度判定手段と、前記特徴点位置候補決定手段の結果を所定の補正条件に基づいて補正する特徴点位置補正手段を有し、前記信頼度判定手段の結果に基づいて前記補正条件を決定することを特徴とする。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】処理負荷を抑えつつ、より高性能なパターン認識を実現することを目的とする。
【解決手段】特徴抽出手段で抽出された画像の特徴に対して複数の部分領域を設定する領域設定手段と、部分領域毎の部分空間を保持する部分空間保持手段と、領域設定手段で設定された複数の部分領域から複数の特徴ベクトルを生成し、部分空間保持手段に保持される部分空間に射影し、複数の射影ベクトルを生成する部分空間射影手段と、部分空間射影手段で生成された複数の射影ベクトルから部分領域の夫々に対応する射影ベクトルを選択する選択手段と、選択手段で選択された射影ベクトルを連結し、識別特徴を生成する特徴生成手段と、特徴生成手段で生成された識別特徴を使用して識別処理を行う識別処理手段と、を有する。
(もっと読む)
カメラポーズ推定装置、カメラポーズ推定方法及びカメラポーズ推定プログラム
【課題】移動物体が含まれる場合においても正確にカメラポーズを算出する。
【解決手段】実空間中の点の3次元座標と、3次元座標が有するテクスチャ情報と、3次元座標が移動物体上か否かを示す移動物体フラグとを3次元点IDに関連付けた3次元リスト情報を記憶する手段と、移動物体フラグが0である3次元点の対応付けを行う3次元点対応付け手段と、最適カメラポーズ情報を出力するカメラポーズ算出手段と、最適カメラポーズ情報を用いてアウトライヤ対応点リスト情報内の3次元座標がフレーム画像に射影される再射影点を決定し、該再射影点とアウトライヤ対応点リスト情報内の対応点座標から算出する動きベクトルを用いて対象の3次元座標が移動物体上か否か判定し、移動物体と判定された場合は、処理対象のアウトライヤ対応点リスト情報内の3次元点IDに対応する移動物体フラグを1に更新して、最終的な最適カメラポーズを出力する。
(もっと読む)
把持物体認識装置、把持物体認識方法、及び把持物体認識プログラム
【課題】撮影等により得られた映像や画像に含まれる人物が把持する把持物体等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物が把持している物体を認識する把持物体認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から手先領域を検出する手先検出手段と、前記手先検出手段により得られる手先領域に対応した手先の位置情報に基づいて、把持物体を検出する把持物体検出手段とを有することにより、上記課題を解決する。
(もっと読む)
認識装置及び認識方法
【課題】タッチパネル非搭載の装置であっても、軽い処理負荷によりユーザの動作に基づく入力操作を認識することを可能とする。
【解決手段】認識装置1は、ユーザの動作に基づき入力操作を認識する装置であって、ユーザの動作を捉えた画像データに基づきユーザの動作を判定する動き判定部23と、判定されたユーザの動作に基づく入力操作に関する情報を出力する出力部25とを備えるので、タッチパネル非搭載の装置であってもユーザの動作に基づく入力操作を認識することが可能となる。また、認識装置1は、1次元以上のデータにより表される画素から成る画像データから1次元のデータにより表される画像データを抽出する抽出部21を備え、動き判定部23は、1次元のデータにより表される画像データに基づきユーザの動作を判定するので、かかる判定処理における処理負荷は軽い。
(もっと読む)
画像処理装置、及びコンピュータプログラム
【課題】本発明は、設計データと輪郭線、或いは輪郭線間のマッチングを行うに当たり、両者の対応点を正確に特定する画像処理装置、及びコンピュータプログラムの提供を目的とする。
【解決手段】上記目的を達成するための一態様として、第1の線分によって形成される第1のパターンと、第2の線分によって形成される第2のパターン間の位置合わせを行うときに、第1の線分と第2の線分上にそれぞれ第1の対応点と、第2の対応点を設定し、第1の対応点と第2の対応点間の距離に基づいて、第1のパターンと第2のパターンの位置合わせを行うためのアライメント量を算出すると共に、第1の線分と第2の線分の形状差に応じて、第1の対応点、及び/又は第2の対応点の位置を変化させる。
(もっと読む)
位置姿勢計測装置、位置姿勢計測方法、およびプログラム
【課題】影が落ちる領域に相当する画像領域から抽出される擬似的な画像特徴の影響を軽減し、フィッティング/マッチングの安定性・精度を向上する。
【解決手段】対象物体の2次元画像を取得する画像取得部と、対象物体の距離画像を取得する距離画像取得部と、距離画像の計測不能領域を対象物体に照射される照明が遮蔽される被遮蔽領域として抽出する抽出部と、対象物体の位置姿勢の概略値に基づいて3次元モデルを2次元画像上に投影する投影部と、投影された線分を構成する点とエッジを構成する点とを組として対応付ける対応付け部と、エッジを構成する点が被遮蔽領域内に存在するか否かを判定する判定部と、存在する場合の組が位置姿勢計測に用いられる重み係数を、存在しない場合の重み係数よりも小さく設定する設定部と、対応付けられた線分を構成する点とエッジを構成する点との距離に重み係数を乗じた値の総和が最小となる位置姿勢を計測する計測部と、を備える。
(もっと読む)
画像検索装置、画像検索方法、および、画像検索プログラム
【課題】検索対象画像内でテンプレート画像と類似している画像領域を検索する場合に、検索対象画像内でテンプレート画像と類似している画像領域を高速に検索することができる画像検索装置を提供する。
【解決手段】画像検索装置が、テンプレート画像の各画素に対して複雑さを示す指標値を算出する指標値算出部と、テンプレート画像を複数の画像領域に分割した場合に、当該分割された複数の画像領域における指標値の合計値がそれぞれ等しくなるように、算出された指標値に基づいてテンプレート画像を複数の画像領域に分割する画像分割部と、画像分割部で分割したテンプレート画像の複数の画像領域と当該複数の画像領域それぞれに対応する検索対象画像内の画像領域とに基づいた類似尺度により、検索対象画像内でテンプレート画像と類似している画像領域を検索する画像検索部と、を備えている。
(もっと読む)
情報処理装置および情報処理方法
【課題】特徴がパターン認識にどれだけ有効か否か、または特徴がパターンの誤認識にどれだけ影響したか、を判別するための定量的な情報を提供する。
【解決手段】情報処理装置は、取得部、特徴算出部、辞書格納部、識別影響度算出部を有する。前記取得部は処理対象のパターンを取得する。前記特徴算出部は前記取得部から得た前記パターンの特徴を示す特徴ベクトルを算出する。前記辞書格納部には識別候補の種別と該識別候補の代表ベクトルの集合とが対応して記憶されている。前記識別影響度算出部は、前記辞書格納部から前記種別に対応する前記代表ベクトルの集合を取得し、該集合と前記特徴ベクトルとから得られる前記処理対象と識別候補との類似度あるいは相違度を前記特徴ベクトルの各成分に対応するように分解し、該分解した値を前記特徴ベクトルの各成分がパターンの識別に影響する度合いとして算出する。
(もっと読む)
情報処理装置および方法ならびにプログラム
【課題】精度良く効率的に入力データのモダリティを検出する。
【解決手段】 入力データを複数の各変換行列U1・(Σ12U2T)を用いて複数の射影データP10を生成し、生成した複数の射影データP10に対し変換行列の逆射影を行うことにより逆射影データP20を生成し、入力データP1と逆射影データP20との相関を変換行列U1・(Σ12U2T)毎に算出し、算出した相関が最も高い変換行列U1・(Σ12U2T)が示すモダリティを入力データのモダリティとして識別する。
(もっと読む)
物体認識方法及び物体認識装置
【課題】予め登録しておくモデルデータのデータ量を抑制しながら、対象物の位置や姿勢を迅速に求めることができる物体認識方法及び物体認識装置を提供する。
【解決手段】距離センサ1により、対象物201を含む所定領域内の各点までの距離計測を行い、三次元物体認識手段3により、これら各点の計測データをメッシュデータ化し、このメッシュデータのグルーピングを行って複数のメッシュグループとし、各メッシュグループの法線ベクトルに垂直な投影平面を作成し、各メッシュグループを対応する投影平面に投影した投影データを求め、投影データの輪郭データを抽出して、輪郭データと対象物の二次元形状データとを比較して、対象物の位置及び姿勢を認識する。
(もっと読む)
ハイパースペクトル画像を解析するための方法および装置
少なくとも2つの波長で一連の画像を作成することができる少なくとも1つのセンサ(1)と、2状態による分類関係に応じて画像の画素を分類することができる計算手段(2)であって、その画像はセンサ(1)から受け取られる、計算手段(2)と、計算手段(2)から受け取るデータを処理することに由来する少なくとも1つの画像を表示することができる表示手段(3)とを含む、ハイパースペクトル画像を解析するための装置。計算手段(2)は、センサ(1)からデータを受け取る、トレーニング画素を決定するための手段(4)と、ハイパースペクトル画像のスペクトルの自動細断を行うことができる射影追跡を計算するための手段(5)と、大きなマージンの分離を作り出すための手段(6)とを含む。計算手段(2)は、分類済み画素が識別可能なデータを作成することができる。 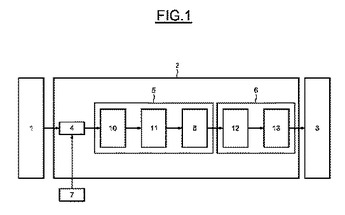 (もっと読む)
(もっと読む)
文書内の表の自動的な位置特定
本発明は、文書内で表を位置特定するための方法であって、文書のための複数のタイルを定義するステップと、タイル毎に水平プロファイルおよび垂直プロファイルを決定するステップと、水平プロファイルおよび垂直プロファイルの勾配を用いて線の位置を検出するステップと、前記線から存続する線を選択するステップと、存続線に基づいて文書の少なくとも1つのコーナ内の矩形を決定するステップと、文書の表として決定された矩形を受け入れまたは拒絶するためにヒューリスティックを適用するステップとを含む、方法に関する。本発明はまた、本発明による方法の適用によって文書内で表を自動的に位置特定するための機器にも関する。  (もっと読む)
(もっと読む)
学習装置及び学習方法
【課題】入力データを、高速、かつ、高精度にパターン識別する識別器を構成することを目的とする。
【解決手段】分岐ノードは、パラメータに基づいて、次に起動するべきノードを決定するノードであり、識別ノードは、パラメータに基づいて、入力データが第2のクラスに属するかどうかを識別するノードであり、第1のクラスに属する学習データの特徴ベクトルに対して多変量解析を行い、方向ベクトルを求める多変量解析手段と、多変量解析手段で求められた方向ベクトルに対して垂直であって、学習データの特徴空間を分割する分割面を決定する分割面決定手段と、分割面決定手段で決定された分割面に基づいて、分岐ノードのパラメータを決定するパラメータ決定手段と、を有することによって課題を解決する。
(もっと読む)
1 - 20 / 104
[ Back to top ]