
Fターム[5L096FA64]の内容
Fターム[5L096FA64]の下位に属するFターム
周囲長 (37)
Fターム[5L096FA64]に分類される特許
1 - 20 / 608
開閉眼検出装置
道路形状推定装置及びプログラム
道路形状推定装置及びプログラム
被写体検出装置、被写体検出方法及びプログラム
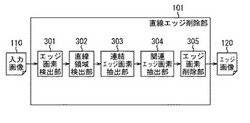
【課題】背景を含む画像から被写体の頭部領域を高精度に検出できるようにする。
【解決手段】検出したエッジ画素に基づいて、ハフ変換を用いて直線を表すパラメータρ、θを検出し、直線パラメータρ、θに基づいて、検出された複数のエッジ画素を含むように所定の幅wの直線領域を検出する。次に、全ての直線領域以外におけるエッジ画素の中から、直線領域と連結する連結エッジ画素を抽出し、注目する直線領域と連結する連結エッジ画素との交点の間の注目する直線領域内のエッジ画素を関連エッジ画素とする。そして、関連エッジ画素以外の直線領域上のエッジ画素を削除する。
(もっと読む)
横断歩道検出装置

【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラム
【課題】球面勾配ベクトルをより確実に算出可能な球面勾配検出方法、エッジ点検出方法、球面勾配検出装置、エッジ点検出装置、球面勾配検出プログラム及びエッジ点検出プログラムを提供する。
【解決手段】球面勾配算出方法は、複数の画素で離散的に表された離散球面に、撮影画像が投影された離散球面画像を形成する離散球面画像形成工程と、記離散球面画像を構成する複数の画素の各々の球面勾配ベクトルを、その球面勾配ベクトルを算出すべき画素の画素値と、その画素に隣接する画素の画素値と、その画素を構成する複数の辺の各々の長さ、その画素の面積と、その画素の中心からその画素を構成する複数の角部の各々への単位ベクトルとに基づいて算出する球面勾配算出工程と、を含む。
(もっと読む)
3次元データ映像の階段認識方法
【課題】3次元データ映像から階段の蹴上げ面及び踏み面を検出して、階段を認識する3次元データ映像の階段認識方法を提供する。
【解決手段】3次元データ映像の階段認識方法は、映像獲得部が、階段が位置する空間の3次元データ映像を獲得する段階と、映像処理部が、前記3次元データ映像から前記階段の連続する両踏み面の間の高さを計算し、前記計算された高さによって、前記連続する両踏み面の間に位置する各ポイントを判断し、前記連続する両踏み面の間に位置する各ポイントを通じて、前記連続する両踏み面の間に位置する蹴上げ面を検出する段階と、前記3次元データ映像から前記階段の連続する両蹴上げ面の間の幅を計算し、前記計算された幅によって、前記連続する両蹴上げ面の間に位置する各ポイントを判断し、前記連続する両蹴上げ面の間に位置する各ポイントを通じて、前記連続する両蹴上げ面の間に位置する踏み面を検出する段階とを含む。
(もっと読む)
文書画像の行分割方法及び行分割システム
【課題】複雑なレイアウトの文書画像の行分割を正確に実現すると共に、ノイズを含む文書画像にも適用する。
【解決手段】テキストブロックを分割して少なくとも1つの画素領域を含む第1の画素領域を取得する第1の分割ステップと、第1の画素領域の各画素領域中の各々の画素行における連続白画素シーケンス間の共通重複部分を空白領域として検出し、第1の画素領域の画素領域から空白領域を除去して第2の画素領域を取得する空白領域除去ステップと、第2の画素領域を利用してテキスト行分割を実行するテキスト行分割ステップとを備える。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
帳票認識方法および帳票認識装置
【課題】 文字や罫線の色が不定で、かつ文字色に濃淡や色の変動がある状況において、文字の画素のみを残し、その他の色の画素をドロップアウトする。
【解決手段】 入力された画像の画素を色クラスタリングして、クラスタ内の画素数から背景と文字の色を求める。画像中の色の分布から文字色の代表値を検出し、文字色の変動幅を考慮して文字色の画素を選択することにより、2値画像を生成する。また、文字の色以外の罫線などのノイズがある場合には、文字とノイズとを弁別して、ノイズをドロップアウトした文字の2値画像を生成する。2つのドロップアウト画像を用いて文字認識を行い、認識スコアが高い方を出力する。2つのドロップアウト方法による2値画像に対して文字認識することで、色むらがある場合と、罫線などのノイズがある場合の両方に対して、認識精度を向上することができる。
(もっと読む)
検索装置、検索方法、記録媒体、ならびに、プログラム
【課題】ユーザの意思に基づいて位置が定められるオブジェクトの位置から検索クエリに指定すべき指定長を得る検索装置等を提供する。
【解決手段】検索装置101において、検知部102は、現実空間内でユーザの意思に基づいて位置が変化する複数のオブジェクトのそれぞれの位置を検知する。算出部103は、検知された複数のオブジェクトの位置から、ユーザの意思に基づく指定長を算出する。検索部104は、少なくとも、商品サイズと、商品画像と、を有する商品レコードが管理される商品データベースから、算出された指定長に基づく検索条件を満たす商品サイズを有する商品レコードを検索する。表示部105は、検索された商品レコードが有する商品画像を画面に表示する。
(もっと読む)
パターン測定方法
【課題】走査型電子顕微鏡で得られるパターンを撮像した画像から、フォトマスクのOPCパターンの寸法を精度良く且つ容易に測定することができるパターン測定方法を提供することを目的とする。
【解決手段】本発明のパターン測定方法は、フォトマスクのOPCパターンのうち、所望の範囲のパターンを包含する一回り大きい測定対象領域を設定し、測定対象領域のパターンの寸法を微小な領域毎に測定し、寸法の測定値を統計的に処理したものを曲線で近似し、近似曲線で表れるデータ群のうち、所望の範囲のパターン寸法に相当するデータ群の平均値を、所望の範囲のパターン寸法として推定する。
(もっと読む)
画像形成装置
【課題】画像サイズの判定のために必要とする情報処理量を削減することができ、画像サイズの判定時間を端出することができ、低コスト化を実現することができる画像形成装置を提供する。
【解決手段】ヒストグラム生成部11によって、原稿における複数の主走査ラインのそれぞれの画素濃度を副走査方向に足し込んだ濃度ヒストグラムを複数生成し、生成された複数の濃度ヒストグラムに基づいて、原稿サイズ判定部12が画像サイズを判定するように構成することにより、画素単位で処理するよりも画像サイズの判定のために必要とする情報処理量を大幅に削減することができる。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
画像処理装置、画像処理方法、画像形成装置、画像処理プログラム
【課題】帳票画像を読み取って罫線を認識する画像処理において、様々な形状を持つ罫線の角部を認識することができる。
【解決手段】幅と長さを有する罫線と、二つの罫線の角部領域に形成される角部罫線領域を有する画像を読み取る画像処理装置において、前記画像から、前記角部罫線領域を抽出する角部罫線領域抽出手段と、前記角部罫線領域の画像から、前記角部罫線領域の画像の特徴量を抽出する特徴量抽出手段と、前記角部罫線領域の複数の角部のパターンに対応した特徴量を保持する特徴量辞書と、前記特徴量抽出手段により抽出された特徴量と、前記特徴量辞書に保持されている前記角部のパターンの特徴量とを比較して一致度を算出し、所定の一致度を有する前記角部のパターンを前記角部罫線として抽出する角部罫線抽出手段と、を有する。
(もっと読む)
外界認識方法,装置,および車両システム
【課題】物体までの距離によらず好適に,車両等の物体検出を行う。
【解決手段】自車周辺を撮影した画像を解析する外界認識装置100は,近傍を表す画像の第一領域,および遠方を表す画像の第二領域を設定する処理領域設定部101と,設定された第一領域において第一の識別器103により物体検出を行う第一の物体検出部104と,設定された第二領域において第二の識別器106により背景パターンをも考慮して物体検出を行う第二の物体検出部104と,検出された物体矩形を補正する矩形補正部107と,検出された物体矩形に基づき衝突までの予測時間を算出する衝突予測時間算出部108を備える。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】検出率を落とすことなく、被写体の周辺に発生する誤検出を低減できるようにする。
【解決手段】入力画像の尤度に基づいて前記入力画像が認識対象であることを判別する画像判別手段と、前記画像判別手段により判別された入力画像から、重複関係にある領域を抽出する抽出手段と、前記重複領域の重複状態を分類する分類手段と、前記尤度と前記重複状態とに基づいて前記重複領域が認識対象であることを判別する判別手段と、を備えた画像認識装置である。
(もっと読む)
線分および円弧検出装置
【課題】ノイズの影響を抑制し、高い精度で線分あるいは円弧の検出を行うことを課題とする。
【解決手段】ハフ変換部14は、輝度画像データ102に対して輪郭抽出処理を実行し、輪郭画像データ103を生成する。輪郭画像データ103の各画素は0〜255の画素値を有する。ハフ変換部14は、輪郭画像データ103の各点に対してハフ変換を実行する。ハフテーブル15には、輪郭画像データ103の各点の画素値、すなわち輪郭強度の値が加算値として集計される。検出部16は、集計値に基づき、線分あるいは円弧を検出する。
(もっと読む)
動体追跡装置
【課題】複数動体が交差しても、効率的かつ正確に動体追跡する。
【解決手段】時系列の連続原画像P(i)からなる動画を画像入力部110で入力し、動体識別画像生成部130により、背景画像との差分をとり、背景と前景を区別する動体識別画像M(i)を生成する。トラッカー格納部150は、個々の動体の輪郭に外接するブロッブ包摂図形を、時系列で格納する。マスキング処理部140は、トラッカー格納部150内の時刻t(i−1)の着目動体Tj以外の動体のブロッブ包摂図形を利用して、動体識別画像M(i)の前景領域をマスキングする。ブロッブ包摂図形抽出部170は、マスキング部分を除く前景領域の輪郭を候補ブロッブ包摂図形として抽出する。トラッカー登録部160は、着目動体Tjの先行ブロッブ包摂図形Bj(i−1)に対する後続ブロッブ包摂図形Bj(i)を候補ブロッブ包摂図形の中から選択し、トラッカー格納部150に登録する。
(もっと読む)
物体検出方法
【課題】監視領域に人、車の両方が入ってくる環境において、監視領域に車が存在することを、差分、二値化、ノイズ除去、ラベリング、大きさ判定処理で行った場合には、二値化のしきい値は環境変化に応じて高くなったり、低くなったりするため、二値化しきい値によっては、1つの物体が複数に分かれて検出されることにより、個々のサイズが小さくなり、車が存在することを認識することができなかった。
【解決手段】正規化相関を使用することで物体の存在領域の認識精度を向上する。この結果、監視領域に車が存在するときには誤検知防止のために処理を停止し、車が存在しないときに侵入者の検知を行う場合、正規化相関処理、差分処理を組合せることにより、車が存在することを認識する性能を向上した。
(もっと読む)
1 - 20 / 608
[ Back to top ]