
東芝アルパイン・オートモティブテクノロジー株式会社により出願された特許
1 - 10 / 110
車載用表示装置
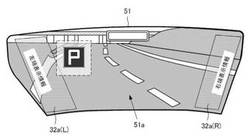
【課題】運転中のドライバーが気を散らすことを抑制しながら安全にして確実な情報伝達の実現を図る。
【解決手段】画像を車両のフロントガラス51に反射させ、この画像を虚像としてドライバーに視認されるように表示する中央表示領域51aと左端表示領域32aLおよび右端表示領域32aRを有するヘッドアップディスプレイ32に表示する情報としては、中央表示領域51aには少ない情報を、左端表示領域32aLおよび右端表示領域32aRには中央表示領域51aの表示情報を補完する情報を仕分けして表示するようにした。
(もっと読む)
車載カメラのキャリブレーション装置

【課題】走行中に後方の車載カメラの光軸を自動的に補正する。
【解決手段】車両後方監視用のビデオカメラ11を備え、後方監視動作のプログラムとカメラ取り付けキャリブレーションプログラムの双方を備えた車両にあって、車両が後進以外どうかを検出して、後方監視動作プログラムとカメラ取り付けキャリブレーションプログラムとを切り換えて同一の制御部12を用いて動作をさせる。ギヤが後進位置にあるときは後方監視プログラムを制御部12で実行させ、ギヤが後進位置以外のときは、キャリブレーションプログラムを制御部12で実行する。これにより、ギヤが後進位置以外のときにカメラ11の取り付け外部パラメータを常時最新の状態に更新することが可能となる。
(もっと読む)
衝突判定方法および衝突判定プログラム
【課題】自車の回転成分を考慮して衝突判定を行うことができる衝突判定方法および衝突判定プログラムを提供する。
【解決手段】本発明の一実施形態に係る衝突判定方法は、車両に設けられたカメラが車両の周囲を撮像するステップと、カメラにより撮像された画像に含まれる対象物の動きベクトルを検出するステップと、自車の並進成分および回転成分を求めるステップと、並進成分による移動量と、現在の対象物の位置における回転成分による移動量および現在から所定の時間後の並進成分のみの移動を仮定した場合の対象物の位置における回転成分による移動量を所定の割合で合成し所定の条件で加工した移動量と、を合成した合成移動量を求めるステップと、合成移動量にもとづいて所定の時間内に車両と対象物とが衝突するか否かを判定するステップと、を有する方法である。
(もっと読む)
警告表示方法および警告表示プログラム
【課題】グルーピングの枠移動を精度よく予測し、より正確に危険物の存在を車両の運転者に警告する警告表示方法および警告表示プログラムを提供する。
【解決手段】警告表示方法は撮像した車両周囲の画像から特徴量を検出するステップと、検出した特徴量にもとづいて、同一の属性を持つ特徴量をグルーピングするステップと、グルーピングされた画像領域に含まれる物体画像の車両に対する危険度を示す信用度を設定するステップと、信用度が所定の高さ以上であると、運転者が視認可能な位置に設けられた表示装置に対して警告表示を行うステップと、グルーピングされた画像領域の次フレームにおける位置を、グルーピングされた画像領域を構成する画素の2フレーム前の画像と1フレーム前の画像間の動きベクトルの平均と1フレーム前の画像と現在のフレームの画像間の動きベクトルの平均とにもとづいて算出した加速度を用いて予測するステップとを有する。
(もっと読む)
自車移動推定方法および自車移動推定プログラム
【課題】画像内に大きな物体が存在しても正確に自車移動パラメータを推定することができる自車移動推定方法および自車移動推定プログラムを提供する。
【解決手段】本発明の一実施形態に係る自車移動推定方法は、車両に設けられたカメラが所定のフレーム周期で前記車両の周囲を撮像するステップと、前記カメラにより撮像された複数の画像間の動きベクトルを検出するステップと、検出された動きベクトルから自車の移動パラメータを求めるステップと、前記自車の移動パラメータを求める際に利用された前記複数の画像の撮像の後に前記カメラにより撮像された画像を用いて新たに動きベクトルを検出するステップと、前記新たに検出された動きベクトルのうち、前記自車の移動パラメータに対応する自車の移動ベクトルとの比較で所定の閾値以内であるものを背景ベクトルとして検出するステップと、この背景ベクトルを用いて新たに自車の移動パラメータを求めるステップと、を有する方法である。
(もっと読む)
動きベクトル算出装置
【課題】映像信号の動きベクトル算出のための演算量を著しく低減するとともに、固定小数点処理をし易くする。
【解決手段】動画像の画像ブロック毎の動きベクトルを算出するために、3次元で定義された一〜三番目の固有値λ1〜λ3のうち、固有値λ1,λ2は近似する静止画の固有値λ'1,λ'2を代用することで、2次固定方程式で求め、精度を必要とする固有値λ3は、通常の分散式で求めている。このように、3次固定方程式を用いることなく動きベクトルを求めることで、演算量を少なくして時間内の処理と動きベクトルの算出精度を向上させることが可能となる。
(もっと読む)
距離推定装置
【課題】自車から障害物までの距離推定の精度向上を図る。
【解決手段】ビデオカメラ11で捕えた画像より建物等の障害物の法線ベクトルを垂直成分抽出部13で抽出し、抽出された法線ベクトルに基づき、傾斜路判定部15で傾斜路かの判定と傾斜路の場合の傾斜角を算出する。予めカメラ11で捕えた画像から基準法線ベクトルを抽出するとともに、画像の画素毎と自車との距離データをメモリ10に保存しておく。自車と障害物まで平坦路と傾斜路があった場合に、平坦路と傾斜路の境界と障害物までの距離を傾斜角に基づき補正するようにして自車から障害物までの距離推定の精度を向上した。
(もっと読む)
車載カメラ用画像補正方法および車載カメラ用画像補正プログラム
【課題】形状や寸法が既知の図形を用いることなく車載カメラの現在の取り付け角度を求めることができる車載カメラ用画像補正方法および車載カメラ用画像補正プログラムを提供する。
【解決手段】車載カメラ用画像補正方法は、車両に取り付けられたカメラが車両の周囲を撮像するステップS1と、カメラにより撮像された画像内の路面画像にもとづいて動きベクトルを検出するステップS5と、検出された動きベクトルを、真上視点の動きベクトルとなるように車両の進行方向軸、路面法線方向軸ならびに進行方向軸および路面法線方向軸に直交する路面平行方向軸の3軸の各軸周りに独立に回転補正させるための式である真上視点の動きベクトルへの変換式を作成するステップS6と、真上視点の動きベクトルへの変換式からカメラの車両に対する取り付け角度を求めるステップS7と、を有する。
(もっと読む)
車載用カメラ
【課題】ローリングシャッタ法で駆動される2台の車載用カメラであって、車両から対象物までの距離を正確に測定することができる車載用カメラを提供する。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
(もっと読む)
画像処理装置
【課題】絵柄間において輝度差のない色差のみがあるシーンにおいても確実に動きベクトルの検出を可能とする。
【解決手段】入力されたビデオ信号R,G,Bの中の一画素の最大値から最小値の色成分差を、カラーコントラスト抽出部11でカラーコントラストとして抽出する。カラーコントラスト抽出部11で抽出されたコントラストを、コントラスト比向上部12で例えば2倍に向上させる。ビデオ信号R,G,Bの輝度信号成分を輝度信号生成部14で生成する。コントラスト比向上部12から出力されるコントラストと輝度信号生成部14で生成された輝度信号を加算部13で加算し、その加算値をグレースケールサイズ以下調整部15に供給し、グレースケールのデータサイズ以下となるように調整する。これにより、絵柄間において輝度差のない色差のみがあるシーンにおける被動き検出用の信号を得ることができる。
(もっと読む)
1 - 10 / 110
[ Back to top ]