
Fターム[5L096GA12]の内容
Fターム[5L096GA12]に分類される特許
1 - 20 / 28
特徴抽出装置、特徴抽出方法、特徴抽出プログラム、および画像処理装置
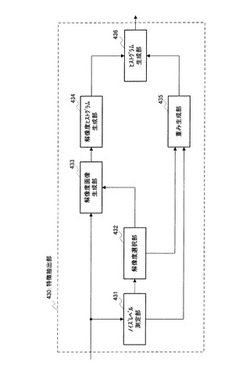
【課題】ローカルバイナリパターンを用いつつ、少ない処理負荷で、画質のばらつきに対してロバストな物体検出が可能な画像特徴を抽出することができる特徴抽出装置を提供すること。
【解決手段】特徴抽出部430は、画像から、複数の解像度の解像度画像を生成する解像度画像生成部433と、生成された解像度画像の全部または一部の画素毎に、周囲の近傍画素との画素値の差分が所定の閾値以上であるか否かをデジタル値により示すローカルバイナリパターンを生成するバイナリパターン生成部を含む解像度ヒストグラム生成部434と、複数の解像度画像から生成されたローカルバイナリパターンの分布を示すヒストグラムを生成するヒストグラム生成部436とを有する。
(もっと読む)
輝度勾配方向検出器及び輝度勾配方向検出方法

【課題】計算量が多い三角関数を用いることなく、高速に輝度勾配方向を検出する輝度勾配方向検出器及び輝度勾配方向検出方法を提供する。
【解決手段】注目画素を囲む8つの画素に時計回りに順に番号を割り振り(B1)、当該8つの画素の輝度値から注目画素を中心とする8つの点対称方向の輝度差分値を求め(B2)、8つの輝度差分値から最大となる最大輝度差分値を求め(B3)、最大輝度差分値を有する方向の画素が中央の番号となるように、8つの画素に時計回りに順に仮番号を割り振り(B4)、中央の番号とその両隣の画素の仮番号について、最大輝度差分値と両隣の画素の輝度差分値を重みとして、仮番号の重み付き平均値を求め(B5)、仮番号の重み付き平均値から中央の番号を引くと共に、最大輝度差分値を有する方向の画素の番号を加えることにより、注目画素における輝度勾配方向を検出する(B6)。
(もっと読む)
画像特徴量算出装置および画像特徴量算出プログラム
【課題】単一の画像から画像特徴量を容易に算出することができるとともに、エッジ間の関係を考慮することで、従来用いられていた画像特徴量よりも、文字らしさ等の判定精度が高い画像特徴量を算出することができる画像特徴量算出装置および画像特徴量算出プログラムを提供する。
【解決手段】画像特徴量算出装置1は、画像に含まれるエッジを検出するエッジ検出手段10と、エッジが検出された画素の周囲の画素におけるエッジの有無を示すエッジパターンを検出するエッジパターン検出手段20と、画像中におけるエッジパターンの出現頻度をパターンの種類ごとに集計し、集計された出現頻度に基づき画像特徴量を算出するエッジパターン集計手段30と、を備える。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および記憶媒体
【課題】画素の連結状態は上下左右の4方向を接続しているとみなす4連結接続の考え方と、斜め方向も接続しているとみなす8連結接続の考え方が存在する。8連結接続が画像に含まれる場合、輪郭抽出時には領域の外側を構成する輪郭(以降外輪郭と呼ぶ)と内側を構成する輪郭(以降内輪郭と呼ぶ)で接続関係が逆転する現象が生じる。色領域の境界線を同定する際には両者の整合性を取る必要があり、画質を落とさず、簡単な同定方法を実現する必要がある。
【解決手段】色領域を3×3画素のフィルタを使って走査し、8連結接続を検知する。修正可能か否かを判断し、8連結接続を4連結接続に置き換える。
(もっと読む)
照明灯検出方法
【課題】駅構内等の天井部等に設置された多数の照明灯の撮影画像に基づき各々の存在を正確に検出し、照明灯の自動清掃システムを実現できる照明灯検出方法を提供する。
【解決手段】この照明灯検出方法は、照明灯を可視光カメラ22によって撮影し画像データを得るステップS11と、二次元画像領域で任意な線33を設定し線上の複数画素に係る画像データを取り出し、画像データの中から輝度極大値に係る画素を検出し、この画素を初期検索位置に設定するステップS12と、初期検索位置を基準とし、検索範囲を設定し、画像データから照明灯候補の画素を検出するステップS13と、擬似形状画素を算出し、この擬似形状画素による擬似形状と照明灯候補画素とを比較して照明灯であるか否かを判断するステップS14を有する。
(もっと読む)
パターン輪郭検出方法
【課題】検査対象パターンに関する情報を用いることなく検査対象パターンの輪郭を検出する。
【解決手段】検査対象パターンの画像からパターンの輪郭点を検出し、グルーピング処理により前記輪郭点から複数の輪郭線を生成し、前記検査対象パターンの外側エッジおよび内側エッジのいずれか一方およびいずれか他方の候補となる第1および第2の輪郭線グループの組合せでそれぞれ構成され、生成された複数の輪郭線を互いに異なる態様でそれぞれ二分する複数の輪郭線グループペアを生成し、前記輪郭線グループペア毎に第1および第2の輪郭線グループ間で形状のマッチングを行って得られたマッチングスコアのうち、最良のマッチングスコアを与える輪郭線グループペアを構成する第1および第2の輪郭線グループのいずれか一方を前記検査対象パターンの輪郭として特定する。
(もっと読む)
対象物検出装置
【課題】 撮影により得られた画像から個々の対象物を的確に、しかも処理負荷を抑えて検出することが可能な対象物検出装置を提供する。
【解決手段】 多値画像(a)である探索対象画像において設定された画素値範囲(128〜255)を“1”、その他を“0”として二値化処理を行う。二値化画像(b)において、“1”の値をもつ抽出の対象画素について、多値画像を参照し、対象画素の画素値に比べ小さい画素値をもつ8近傍画素の個数が所定の閾値未満の場合、その対象画素の値を“0”として抽出対象から除外する。このようにして、複数の対象物の境界部と判断される画素を抽出対象から除外することにより、的確に輪郭を判定することが可能となる。
(もっと読む)
瞼検出装置、瞼検出方法及びプログラム
【課題】光環境の影響をうけないで、瞼を精度よく検出することができる装置を提供する。
【解決手段】カメラ2は対象者の顔を連続的に撮影し、瞼検出装置10の制御部14はその顔画像を取得し、画像メモリ12に格納する。制御部14は、顔画像から瞼探索領域を判別し、この瞼探索領域内からエッジを抽出して、連結するエッジ(エッジグループ)毎にラベルを付与する。そして、制御部14は、ラベリングしたエッジグループの経時的な動きの変化から同一のエッジグループを判別し、同一のエッジグループ同士に同一のラベルを付与する再ラベリングを行う。そして、制御部14は、このようにしてラベリングしたエッジグループの経時的な動きの変化から、上瞼に相当するエッジグループを検出して、検出した上瞼に相当するエッジグループの下方の所定領域から、下瞼に相当するエッジグループを検出する。
(もっと読む)
動きベクトル検出装置、動きベクトル検出方法及びプログラム
【課題】動画像データから得た動きベクトルの評価情報を使用して、候補ベクトルを検出する場合の精度を向上させる。
【解決手段】頻度の高い動きベクトルを検出すると共に評価情報を生成する処理部12と、評価情報に基いて動きベクトルを抽出する抽出部13と、抽出された候補の中から動きベクトルを決定する動きベクトル決定部14とを備える。評価情報の生成処理部12は、時間軸上における一方のフレームの注目画素と、他方のフレームのサーチ範囲内の参照画素との相関情報から求められる動きベクトル候補が高頻度動きベクトルと相関が高いかどうか判定する。その判定で相関が高い場合、動きベクトル候補に対応する注目画素及び/又は参照画素をフレーム中の画素から選別し、選別された画素以外の画素に基づいて、参照画素が注目画素の動き候補である可能性を評価した動きベクトルの評価情報を形成する。
(もっと読む)
画像処理装置および画像処理方法
【課題】従来検出しにくかった条件下でのエッジ検出精度を高めること。
【解決手段】画像処理装置によって、複数の画素からなる画像に含まれる対象画素(x,y)およびその隣接画素(x−1,y−1),(x,y−1),(x+1,y−1),(x,y−1),(x,y+1),(x+1,y−1),(x+1,y),(x+1,y+1)の彩度(Pxy,Qxyn(n=1〜8))が算出され(S101〜S103)、対象画素と隣接画素との色相差(θxyn(n=1〜8))が算出され(S101,S104)、算出された対象画素および隣接画素のいずれの彩度も所定の彩度閾値(RefA)未満である場合(S105でNOの場合)、または、算出された対象画素と隣接画素との色相差が所定の色相差閾値(RefB)未満である場合(S106でNOの場合)、当該対象画素が非エッジ画素と判別される(S107,S108)。
(もっと読む)
画像特徴抽出装置、画像特徴抽出方法、プログラム、及び記録媒体
【課題】線図形とその背景との間で輝度が類似している場合でも、エッジペア(色エッジペア)を適切に抽出する。
【解決手段】線図形を含む画像から色エッジペアを抽出するための画像特徴抽出装置において、画像格納手段から前記画像を取得する画像取得手段と、前記画像から色エッジを抽出する色エッジ抽出手段と、前記色エッジ抽出手段により抽出された色エッジの中から色エッジペア候補集合を抽出し、線図形が局所的に類似する色を有するという性質に基づく色エッジペア抽出条件を満足する色エッジペア候補を、色エッジペアとして前記色エッジペア候補集合の中から抽出する色エッジペア抽出手段とを備える。
(もっと読む)
画像処理装置、方法及びプログラム
【課題】構成や処理の複雑化を招くことなく、人物に相当する領域である確度の高い人物候補領域を画像から抽出可能とする。
【解決手段】処理対象画像の全領域を対象として人物に相当すると推定される人物候補領域を探索・抽出し(52)、抽出した個々の人物候補領域に対し、領域内のエッジ画素を抽出し(58〜68)、領域内の人工的な直線状線分や曲線状線分を探索・抽出し(70〜86)、領域内に人工的な直線状線分や曲線状線分が明瞭に存在している場合(88が肯定)は出力対象から除外(90)する処理を順に行い、出力対象から除外されずに残った人物候補領域を、人物領域である確度の高い領域として出力する(94)。
(もっと読む)
画像処理装置及び画像処理方法
【課題】ベクトルの方向の違いによって隣接する構造物を分離する画像処理装置及び画像処理方法画像処理装置及び画像処理方法を提供する。
【解決手段】画像処理装置3の算出部34は、入力画像43に基づいてベクトル7の算出を行う。続いてベクトルグループ分類部35は、ベクトルグループ8に基づいてベクトルグループ分類処理を行い、ベクトルグループ画像43cを生成する。検出部36は、上まぶた20、テンプル90及び上レンズ91が結合する結合領域43bにおいて、隣接グループ削除処理を行い、結合を分離させる。
(もっと読む)
輪郭情報生成方法及びシステム、並びにプログラム
【課題】画像内に存在する対象物の輪郭を効率よく、確実に抽出する。
【解決手段】入力した点と入力ポインタの間を一定の太さを有するラバーバンドが表示され、入力する線分を該ラバーバンド内に入れるように点を入力させる。これによりオペレータは入力ポインタの位置を精密に決めて入力決定を行うという手間を省くことができ効率よく入力を行うことができる。しかし、入力した線分をそのまま表示させては正確さに欠ける輪郭が生成されてしまう。そこで入力した線分を画像に合わせて補正する処理を行うことにより画像に撮像されている地物に合った輪郭を生成することができる。
(もっと読む)
映像処理装置と方法及びその記録媒体
【課題】映像における対象体を効率的に検出する。
【解決手段】ラベリング変換のための変換マトリックス領域に属する二進化映像のピクセルのうちラベリング変換の対象ピクセルに隣接した周囲ピクセル値を検出する検出部110と、周囲ピクセルの値に二進化映像を示す値のみが存在する場合、既に付与されたラベル値と異なるラベル値を上記対象ピクセルに付与し、周囲ピクセルの値にラベル値が存在する場合、周囲ピクセルに存在するラベル値を対象ピクセルに付与するラベリング部120を含む。
(もっと読む)
画像処理式物体検出装置
【課題】撮影手段の撮影画像から検出対象を検出するに際して、これを時間ロスなく瞬時に行うことができる画像処理式物体検出装置を提供する。
【解決手段】差分画像抽出部21は、カメラ5から取得した非投光画像と投光画像との差分である投光差分画像を抽出する。垂直エッジ画像抽出部23は、この投光差分画像を用いて、画像上において垂直方向の輝度変化が大きくかつ水平方向には輝度変化の少ない画像として垂直エッジ画像を抽出する。特徴量算出部25は、この垂直エッジ画像にスキャン用のブロックを当て嵌めてそのブロック内の垂直エッジ値を抽出し、各々のスキャン位置ごとに特徴量として算出する。眉間位置特定部26は、最も高い特徴量を取る時のブロックから特定される画像上の座標位置を眉間位置として特定し、この眉間位置を基準にして画像上の各種顔部品を特定する。
(もっと読む)
顔方位判定装置
【課題】顔方位の判定にあたり制約を少なくすることを課題とする。
【解決手段】顔を撮像した顔画像から、顔画像の中に存在する一つの顔の鼻腔を検出し、検出される鼻腔を基点として顔画像を左方向および/または右方向に探索すると交わることになる顔の輪郭との交点を、顔画像から顔の端点として検出し、検出された鼻腔と検出された端点とから求められる顔画像内の距離に関する情報に基づいて、顔画像に撮像された顔が、撮像の時にいずれの方向を向いていたかを示す顔方位を判定する。また、顔方位判定装置は、検出された二つの鼻腔から、二つの鼻腔の中心を示す鼻腔中心を検出し、検出された二つの端点から、二つの端点の中心を示す端点中心を検出し、いずれか一方の端点と端点中心との距離および端点中心と鼻腔中心との距離に基づいて、顔方位を判定する。
(もっと読む)
眼部検出装置、眼部検出方法及びプログラム
【課題】顔画像から眼を速く確実に検出できる眼部検出装置を提供する。
【解決手段】顔画像を取得する画像入力部21と、顔画像から鼻孔を検出する鼻孔検出部24と、鼻孔検出部24で検出した鼻孔の位置にもとづいて、顔画像の中に眼探索領域を設定する眼探索領域設定部25と、眼探索領域設定部25で設定した眼探索領域の範囲で、顔画像の下から上に向かって所定の条件で眼を探索する下瞼検出部26及び上瞼検出部27と、を備える。好ましくは、顔画像から口下の位置を検出する口下検出部22を含み、鼻孔検出部24は、鼻孔の探索条件に適合する複数の鼻孔候補を検出した場合、該複数の鼻孔候補のうち、口下の位置に最も近いものを鼻孔と判定する。さらに、顔画像の中で鼻孔が存在する可能性の高い領域を、鼻孔探索領域として設定する鼻孔探索領域設定部23を含み、鼻孔探索領域を所定の条件で探索して、隣り合う2つの暗所を鼻孔と判定する。
(もっと読む)
眼部検出装置、眼部検出方法及びプログラム
【課題】化粧等を施した場合でも、顔画像から眼部を精度よく検出する装置を提供する。
【解決手段】顔画像を取得する画像入力部21と、顔画像から上瞼又は下瞼の所定の条件に適合する上瞼候補及び下瞼候補を検出する瞼エッジラベリング部24と、上瞼候補と下瞼候補の組み合わせを比較し、上瞼候補と下瞼候補の関係が所定の条件に最も適合する組み合わせを上瞼および下瞼と判定する瞼判定部27とを備える。瞼エッジラベリング部24は、エッジ算出部23で算出した水平方向エッジ及び垂直方向エッジのうち、所定の条件に適合する度合いによって、上瞼候補及び下瞼候補を分類する。下瞼候補の左右方向に少なくとも1つの水平方向エッジが存在する場合に、その下瞼候補を除外する下瞼候補評価部26を備えてもよい。下瞼候補のうち、その垂直方向エッジが所定の条件を満たさないものを下瞼予備候補として分類する下瞼候補分別部25を備えてもよい。
(もっと読む)
高次局所共起特徴導出方法及びプログラム
【課題】 高次局所自己相関特徴量の上位概念として高次局所共起特徴を導出する。
【解決手段】 並進した画像と相関をとる際に、並進した画像が一つとは限らないように一般化した自己相関の拡張である高次局所自己相関(HLAC)で使用する0〜N次の各次マスクパターンを用意する。0〜N次の各次マスクパターンに対して、それぞれ0〜N次の高次局所自己相関(HLAC)で参照される近傍の輝度値の結合ヒストグラムを生成する。これらヒストグラムを高次局所共起特徴とする。高次局所自己相関(HLAC) 特徴量の一つの拡張的概念として、高次局所共起特徴を導出する。
(もっと読む)
1 - 20 / 28
[ Back to top ]