
Fターム[5L096GA17]の内容
Fターム[5L096GA17]に分類される特許
1 - 20 / 285
シフト及び画像の小さな歪みの推定
画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法
【課題】抽出したい対象エッジ近傍にノイズエッジが出るような場合でも、安定して検出対象エッジのみを選択することが可能な画像処理装置、画像処理プログラム、ロボット装置及び画像処理方法を提供する。
【解決手段】入力画像に対してエッジ抽出を行い、抽出した複数のエッジから、その全ての交点位置を算出し、算出した全交点位置にて、予め登録しておいた検出対象エッジの交点位置、つまり検出対象ワークの角部を中心位置とした特徴点テンプレート画像を用いてパターンマッチングを行う。そして、全交点位置でのパターンマッチングの結果から、最も類似度の高かった交点位置を形成するエッジを、検出対象エッジに対応する検出対象とするエッジとして選択することができる。
(もっと読む)
検出装置、及び、検出方法

【課題】検出対象物の検出処理速度を向上させること。
【解決手段】センサーの出力に対応する階調値を含む検出対象画像を生成する画像生成部と、前記検出対象画像から検出対象物を検出することに用いる学習済みの識別器を基準ウィンドウ毎に有する検出器と、を備え、前記画像生成部は、各基準ウィンドウの複数の倍率のサイズで前記検出対象画像を生成し、前記識別器は、前記基準ウィンドウにおいて分割された各領域に対応するサブ識別器を含み、前記検出器は、前記検出対象画像の倍率に応じた領域の前記サブ識別器に、前記検出対象画像における領域の階調値を入力し、前記サブ識別器の出力に基づいて前記検出対象画像における検出対象物の検出を行う、検出装置。
(もっと読む)
画像処理装置、方法、及び画像表示装置
【課題】対象物の三次元位置を高精度で算出する。
【解決手段】実施形態の画像処理装置は、実施形態の画像処理装置は、第1取得部、第2取得部、第1設定部、第2設定部、第1算出部、及び第2算出部を備える。第1取得部は、対象物が複数の位置から撮像された複数の撮像画像を取得する。第2取得部は、前記対象物の仮三次元位置と、前記対象物の仮サイズを取得する。第1設定部は、実空間における前記仮三次元位置の近傍に少なくとも1つの探索候補点を設定する。第2設定部は、前記探索候補点を前記撮像画像に射影した射影位置毎に、前記対象物を探索するための探索窓であって、前記探索候補点の位置と前記仮サイズとに基づくサイズの前記探索窓を設定する。第1算出部は、前記探索窓内において、前記対象物が含まれるかどうかを示す評価値を算出する。第2算出部は、前記評価値に基づいて前記対象物の三次元位置を算出する。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となるブロックサイズが異なる場合においても、その信頼性を正当に評価する。
【解決手段】画像処理装置120のマッチング処理部172は、一対の画像データそれぞれから、対象物の相対距離に応じた大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定する。信頼性評価部174は、特定されたブロックの信頼性を示す評価値をブロックの大きさに基づいて1または複数導出する。そして、正規化部176は、導出された評価値を、その評価値の最大値が基準ブロックにおける評価値の最大値の面積比となるように正規化し、特定されたブロックに関連付ける。こうして、マッチング処理部172によって導出される視差を、正規化された評価値で正当にフィルタリングすることが可能となる。
(もっと読む)
画像処理装置
【課題】パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、輝度が復元された一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部176と、を備え、色復元部およびマッチング処理部は、ベイヤー配列で占有度が最も高い色相のみを対象に、それぞれ輝度の復元およびマッチングを実行する。こうして、パターンマッチングに利用する色相を特定することで適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
画像認識装置、画像認識方法及びプログラム
【課題】検出率を落とすことなく、被写体の周辺に発生する誤検出を低減できるようにする。
【解決手段】入力画像の尤度に基づいて前記入力画像が認識対象であることを判別する画像判別手段と、前記画像判別手段により判別された入力画像から、重複関係にある領域を抽出する抽出手段と、前記重複領域の重複状態を分類する分類手段と、前記尤度と前記重複状態とに基づいて前記重複領域が認識対象であることを判別する判別手段と、を備えた画像認識装置である。
(もっと読む)
レーン認識装置
【課題】撮像画像上でレーンが映らない場合でもレーン認識を可能にする。
【解決手段】レーン認識装置10は、自車両走行路の撮像画像内に第1画像処理領域を左右個別に設定して車線標示を検出する車線標示検出部31と、検出した撮像画像内の左右一方の車線標示及び車線幅に基づき撮像画像内において左右他方の車線標示位置を推定する車線標示位置推定部33と、自車両走行路の撮像画像内に第1画像処理領域を含みかつ第1画像処理領域よりも広い第2画像処理領域を設定して車線標示を検出する広域車線標示検出部34と、車線標示検出部31による車線標示の検出結果及び車線標示位置推定部33による車線標示位置の推定結果それぞれに対し広域車線標示検出部34による車線標示の検出結果とのマッチングを行う検出結果照合部35と、検出結果照合部35のマッチング結果に基づきレーンを認識するレーン認識状況判断部36とを備える。
(もっと読む)
特定領域抽出装置及び特定領域抽出プログラム
【課題】画像中の特定領域を効率的かつ高精度に抽出する。
【解決手段】入力画像に対する特定領域を抽出する特定領域抽出装置において、前記入力画像に対して所定の形状からなる窓領域を設定する窓領域設定手段と、前記窓領域設定手段により得られる窓領域を前記入力画像の左右方向及び上下方向に対してそれぞれ所定間隔で移動させ、各移動位置における前記窓領域に含まれる画像特徴を取得する特徴取得手段と、前記窓領域の移動に伴う前記特徴取得手段により得られる画像特徴の変化量に基づいて1又は複数の境界を設定する境界設定手段と、前記境界設定手段により設定される境界に基づいて特定領域を抽出する特定領域抽出手段とを有することにより、上記課題を解決する。
(もっと読む)
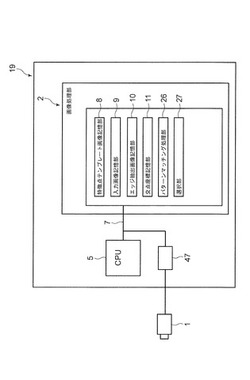
物体検出装置
【課題】入力された画像から、検出対象物を高い精度で検出することができる物体検出装置を提供することを課題とする。
【解決手段】物体検出装置1において、検出窓設定部11は、カメラが撮影した撮影画像21を入力する。検出窓設定部11は、撮影画像21に対して検出窓領域を設定し、撮影画像21から、検出窓領域の画像を通常窓画像22として切り出す。画像処理部12は、撮影画像21に対して拡大、縮小などの画像処理を行う。拡大された撮影画像21と、縮小された撮影画像21から、変更窓画像23がそれぞれ切り出される。度合い算出部13は、検出対象物の特徴を示す特徴データ51に基づいて、検出対象物が窓画像に存在する可能性を示す一致率を窓画像ごとに算出する。判定部14は、各窓画像の一致率に基づいて、検出窓領域に検出対象物が存在するか否かを判定する。
(もっと読む)
識別装置及び識別プログラム
【課題】検出処理を高速化する。
【解決手段】識別装置10は、入力データの特徴量を生成する特徴量生成部3と、特徴量が第1閾値と第2閾値とで挟まれた所定範囲内に存在するか否かを判定する判定部4と、検出対象と非検出対象との識別性能が高いほど重みが大きくなるように設定された重み設定部5とを備えた弱識別器2と、弱識別器2を複数備え、各弱識別器2における特徴量の判定結果と重みとの積算値の線形和に基づいて入力データが検出対象であるか否かを識別する強識別器1とを有する。
(もっと読む)
パターン識別装置、方法及びプログラム
【課題】複数のメモリを使ってインテグラルイメージの読み出しを高速に行う方法が提案されているが読み出す局所領域の形状(幅、高さ)に制約を設ける必要があるため、検出精度に影響を与える場合がある。その場合、前記高速化手法で検出精度が低下し要求検出精度を満たせずに問題となる。
【解決手段】パターン識別に使用する複数の局所領域の中でインテグラルイメージの読み出しを高速化できる形状を持つ局所領域と前記形状制約を外して検出精度を重視できる形状を持つ局所領域とに分ける。そして、これらの割合を調整し、検出精度の低下を軽減させる。
(もっと読む)
環境認識装置及びプログラム
【課題】環境認識の精度を向上させることができる環境認識装置及びプログラムを提供すること。
【解決手段】被写体を撮像することにより得られた画像を、明度情報に基づき同一の物体である可能性が高い領域に分割し、同一の分割領域に存在する複数の特徴点となる画素の距離情報に基づいて、特徴点以外の画素の距離情報を補完して距離画像を生成し、注目画素の距離情報に基づいて特徴量を抽出するためのウインドウのサイズを変更し、該ウインドウ内の画素から注目画素の特徴量を抽出し、抽出した特徴量と予め求めておいた対象物毎の特徴量とを比較することにより画素毎に物体を識別し、分割領域内の画素の識別結果を統合して、分割領域毎に対象物を識別して環境認識を行う。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】検出対象の付近に発生する誤検出を低減して検出精度を高めることができるようにする。
【解決手段】入力画像に対して検出ウィンドウを走査し、前記検出ウィンドウ内の画像を評価して被写体か否かを判定し、被写体候補を出力する。そして、前記被写体候補のうち、互いに重複する被写体候補について位置関係を算出して、前記位置関係に基づいて被写体か否かを再判定する。このとき、検出ウィンドウを走査する際には、前記入力画像に対する前記検出ウィンドウを相対的に複数のサイズで走査し、位置関係を算出する際には、所定の位置の差と、サイズ比との関係にある被写体候補の組を選択する。そして、前記選択した被写体候補の各組について、それぞれの前記被写体候補間の位置関係に基づいて再判定する。
(もっと読む)
物体検出装置
【課題】対象物の検出処理を高速化することができる物体検出装置を提供する。
【解決手段】検出処理部4は、撮像装置10で撮影された画像信号の各フレームの画像を、複数のサイズの探索窓を用いて走査することにより、各フレームの画像に含まれている対象物を検出する。探索窓生成部5は、探索窓のサイズを設定し、検出処理部4が対象物を検出した際の対象物の位置情報に対応させて、対象物を検出した際に用いた探索窓のサイズを保持部6に保持させる。検出処理部4は、保持部6に保持された位置情報が示す位置を走査する際には、複数のサイズの全てを用いることなく、位置情報に対応して保持されたサイズを基準とした限定したサイズを用いる。
(もっと読む)
画像識別装置及びプログラム
【課題】横向き二輪車を表わす画像を精度よく識別することができるようにする。
【解決手段】ウィンドウ画像抽出部22は、ウィンドウ画像を抽出して上下に分割する。セル特徴量計算部24は、ウィンドウ画像の各セルについて勾配ヒストグラムを計算する。上部ブロック設定部26は、ウィンドウ画像の上部に、連続する所定個のセルからなるブロックを走査し、上部特徴ベクトル算出部28は、各ブロックの勾配ヒストグラムから、画像特徴ベクトルを算出する。下部ブロック設定部30は、ウィンドウ画像の下部に、左右対称に位置する所定個のセルからなるブロックを走査し、下部特徴ベクトル算出部32は、各ブロックの勾配ヒストグラムから、画像特徴ベクトルを算出する。識別部36は、算出された上部及び下部の画像特徴ベクトルに基づいて、乗員ありの横向き二輪車を表わす画像であるか否かを識別する。
(もっと読む)
情報処理装置、情報処理方法、及び、プログラム
【課題】入力画像に、所定の対象物が映っているか否かの判別の判別性能の低下を、容易に防止する。
【解決手段】補正部は、入力画像から抽出された特徴量を入力として、入力画像に所定の対象物が映っているか否かを表す弱仮説を出力する複数の弱識別器を有するアンサンブル識別器のパラメータを、補正情報を用いて補正する。判別処理部は、パラメータの補正後のアンサンブル識別器を用い、特徴量に対して、弱識別器が出力する弱仮説を積算し、その弱仮説の積算値に基づいて、入力画像に、対象物が映っているか否かを判別する。補正情報は、補正情報算出部54において、対象物を照明する光源に基づいて算出される。本技術は、例えば、入力画像に対象物が映っているか否かを判別する場合等に適用できる。
(もっと読む)
画像処理装置、画像処理方法及びプログラム
【課題】高精度かつ処理コストの低い被写体検出器を提供する。
【解決手段】入力画像に対して検出ウィンドウを走査する検出ウィンドウ走査手段と、検出ウィンドウ内の画像が、検出対象の被写体全体か否かを判定し、被写体候補を出力する被写体全体判定手段と、被写体候補同士に所定の重なりがある場合に重なりのある前記被写体候補の組みを出力する被写体候補重複判定手段と、予め検出ウィンドウ上に1つまたは複数の部分領域を設定し、各々の領域が被写体の一部であるか否かを判定する被写体部分判定手段と、被写体候補重複判定手段が出力する被写体候補の組みについて、被写体部分判定手段の結果に基づき被写体か否かを総合的に判定する被写体判定手段を有し、検出ウィンドウ走査手段は、入力画像に対する検出ウィンドウを相対的に複数のサイズで走査し、被写体候補の組みはそれぞれの組みにおいてサイズの異なる被写体候補を少なくとも1つ有する。
(もっと読む)
シーンにおけるオブジェクトを分類する方法
【課題】オブジェクト分類は、3D距離データ用の正確な分類方法が必要であり、オブジェクトを分類する方法を提供する。
【解決手段】移動するオブジェクトが、1組の1つ又は複数の1次元レーザーラインスキャナーを備えたスキャナーによって取得された距離データの最大マージン分類及び識別確率的逐次モデリングに基づいて分類される。2次元画像の形態での距離データは、前処理され、その後分類される。分類器は、外観分類器と、種々の推論技法を用いる系列分類器と、オブジェクトの構造の状態機械実施とから構成される。
(もっと読む)
認識装置、認識方法及びプログラム
【課題】学習画像にあまり含まれない特徴パターンを含む画像が入力された場合においても、被写体を安定して検出することができるようにする。
【解決手段】入力画像から複数の特徴量を算出する特徴算出手段と、前記特徴量の夫々について事前に収集した画像及びその重みから認識対象に対する尤度を出力するように生成した認識モデルを用いて前記特徴量の尤度を求め、前記入力画像が前記認識対象かどうかを判定する判定手段とを備え、前記判定手段は、前記特徴量の値に該当する学習画像数が所定の値よりも少なく、かつ前記尤度の確信度が所定の値よりも高い場合に前記尤度の確信度が低くなるように補正する。
(もっと読む)
1 - 20 / 285
[ Back to top ]