
Fターム[5L096LA01]の内容
Fターム[5L096LA01]に分類される特許
1 - 20 / 93
画像認識装置
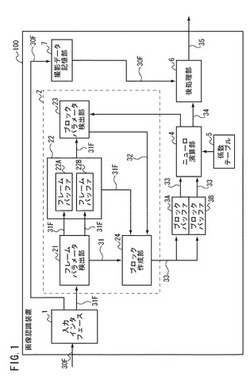
【課題】本発明は、ハードウェアの規模を小さくでき、ニューロ演算を用いた画像認識処理をリアルタイムで実行することができる技術を提供することを課題とする。
【解決手段】画像認識装置100は、車載カメラが撮影した動画像データのフレーム30Fに歩行者が撮影されているか否かを判定する。前処理部2は、フレームの中から検出ブロックを決定し、フレームから検出ブロックに対応するブロック画像データを切り出す。ブロック画像データから、検出ブロックのサイズよりも小さい所定サイズのブロックデータ33が作成される。ニューロ演算部4は、ブロックデータ33をニューロ演算して出力シナプス34を算出する。後処理部6は、出力シナプス34に基づいて、検出ブロック内に歩行者がいるか否かを判定する。後処理部6は、歩行者が検出された場合、歩行者が検出された検出ブロックをフレーム30Fの上に重ねた結果データ35を作成する。
(もっと読む)
パターン識別装置、方法及びプログラム

【課題】複数のメモリを使ってインテグラルイメージの読み出しを高速に行う方法が提案されているが読み出す局所領域の形状(幅、高さ)に制約を設ける必要があるため、検出精度に影響を与える場合がある。その場合、前記高速化手法で検出精度が低下し要求検出精度を満たせずに問題となる。
【解決手段】パターン識別に使用する複数の局所領域の中でインテグラルイメージの読み出しを高速化できる形状を持つ局所領域と前記形状制約を外して検出精度を重視できる形状を持つ局所領域とに分ける。そして、これらの割合を調整し、検出精度の低下を軽減させる。
(もっと読む)
並列演算装置及びマイクロコンピュータ
【課題】並列的に入力されるデータに対処してヒストグラムの度数データを生成することができ、ヒストグラムの度数データを生成する処理時間をその入力データにおけるヒストグラム値の分布状況に依存せず、更にはヒストグラムの度数データを累積するために用いる記憶領域を少なくすることができる並列演算装置を提供する。
【解決手段】複数のプロセッサによる並列的な演算結果に対して、演算結果の種別毎にそのデータ数を並列的に計数する複数のカウンタを有し、夫々のカウンタの計数値を累積してヒストグラムの度数とするヒストグラムカウンタ回路を備える。
(もっと読む)
画像処理装置、画像処理方法及び集積回路
【課題】複数の画像について、粗いマッチングの処理及び詳細なマッチング処理を行う場合に並列に処理できる効率の良い画像処理装置を提供する。
【解決手段】画像処理装置は、p(pは2以上の整数)個のブロック画像と照合するための、複数の簡易パターンと、簡易パターン毎に対応付けられた複数の照合パターンとを記憶し、互いに異なる一のブロック画像が割り当てられ、全ての簡易データと、割り当てられたブロック画像とを用いた第1相関演算を行うp個の第1演算部と、前記ブロック画像全てについて、当該ブロック画像との前記第1相関演算により相関関係が最も高い簡易パターンに対応する照合パターンを順次読み出して、第2相関演算を行う第2演算部とを備え、各々の簡易パターンについて、前記第1演算部それぞれは、同一のタイミングで取得する。
(もっと読む)
情報絞り込み検出機能を備えたメモリ、その使用方法、このメモリを含む装置。
【課題】
パターン認識など情報検出の最大の課題は検索時間でありメモリの逐次比較処理が不要な非ノイマン型情報検出メモリを実現する。
【解決方法】
メモリアドレスごとに情報を記憶しその情報を読み出し可能なメモリで、このメモリは、外部から与えられる第1のデータは記憶されたメモリのデータを比較するためのデータ、第2のデータはアドレス同士を比較するためのデータ、の双方の入力データの入力手段と、この入力手段から与えられた上記双方の入力データにより記憶された情報のデータと、そのアドレスと、の双方を二重並列に合否判定し、その双方の合否判定結果をさらに並列に論理演算する手段と、上記論理演算に合格するこのメモリの上記アドレスを出力する手段と、を具備することを特徴とする情報絞り込み検出機能を備えたメモリであるのでインテリジェンスな情報検索はもとより人工知能等に広く利用可能である。
(もっと読む)
データ処理装置、データ処理装置の制御方法、およびプログラム
【課題】パラメータのプリフェッチ効率を上げ、処理時間を短くする。
【解決手段】複数の入力データのそれぞれに対して辞書データを参照して入力データの所定領域ごとに1または複数の照合処理を順次行い、対象物体を認識するデータ処理装置であって、照合処理で参照する辞書データを取得する取得部と、取得部により取得された辞書データを複数保持可能な保持部と、保持部により保持された1つの辞書データを参照して入力データに対して照合処理を行う演算部と、演算部による処理結果を保持する履歴保持部と、演算部が後続の照合処理で参照する辞書データを、後続の照合処理の前に予め取得部が取得して保持部に保持するプリフェッチ処理を行うか否かを、処理結果に基づいて判定するプリフェッチ判定部と、プリフェッチ処理を行うと判定された場合に当該プリフェッチ処理を行う処理部と、を備える。
(もっと読む)
画像処理装置、方法、及びプログラム
【課題】サブ領域毎に特徴値のヒストグラムを高速に算出すると共に、サブ領域における特徴値のヒストグラムの算術演算値を複数のサブ領域に渡って総和した値を高速に算出する。
【解決手段】処理対象画像の各画素の特徴値を算出し、各ビン別に、特徴値の積分値を付与した積分画像を作成する(S3−2)。各ビン別に、各位置にサブ領域を設定した場合について、サブ領域内の特徴値のヒストグラムの値を、サブ領域内の座標(x、y)に付与したサブ領域積算値画像を生成する。各ビン別に、各位置にサブ領域を設定した場合について、サブ領域内の座標(x、y)において計算されたサブ領域積算値画像の各画素値(ヒストグラムの値)と座標(x、y)に対してサブ領域の大きさのn倍離れた座標において計算されたサブ領域積算値画像の各画素値(ヒストグラムの値)の2乗和を、座標(x、y)に付与したサブ領域積算値積分画像を生成する(S3−3)。
(もっと読む)
物体検出システム、物体検出方法、及びプログラム
【課題】小さい物体の検出と高速に移動する物体の検出とを両立することを目的とする。
【解決手段】第一の物体検出手段と第二の物体検出手段と通信手段とを有するシステムで、第一の物体検出手段は、画像から規定の物体を検出し、通信手段は、画像の解像度が異なる画像、及び第一の物体検出手段で検出された物体の画像を第二の物体検出手段に送信し、第二の物体検出手段は、異なる画像から物体とは異なる他の物体を検出することによって課題を解決する。
(もっと読む)
検出装置、負荷低減方法およびプログラム
【課題】大きさがおおよそ同じである複数の物体がほぼ同一平面上に配置されている場合に、それら複数の物体を撮影した画像中の複数の物体像のそれぞれを検出する際の処理負荷が著しく増大してしまうのを回避する。
【解決手段】画像から相互に異なる複数の大きさの物体像のそれぞれを検出可能な複数の検出部を有する検出装置であって、画像の入力を受け付け、受け付けた画像を構成する画素データを当該画像の行毎に複数の検出部へ出力する画像分配部と、画像分配部にて受け付けられる画像中の複数の物体像のそれぞれの大きさと、当該複数の物体像のそれぞれの当該画像中の列方向の位置との関係を算出する算出部とを有し、画像分配部は、算出された関係に基づいて複数の検出部のうち当該行の画素データを出力する検出部を選択し、複数の検出部のそれぞれは、画素データを受け付けると、受け付けた画素データが示す画像から物体像を検出する。
(もっと読む)
ラベリング処理装置及びラベリング処理方法
【課題】ラベリング処理を高速化する。
【解決手段】第1のプロセッサは、2値化された画像データP1において注目画素Aを主走査方向であるX軸方向及び副走査方向であるY軸方向に走査させる。そして、第1のプロセッサは、注目画素Aが2値のうちの一方の値「1」の画素である場合に、注目画素Aに一時的に仮ラベル番号を付与する仮ラベル付処理を実行する。その際、第1のプロセッサは、注目画素の主走査方向の走査を1ライン終える度に、1ライン全ての画素が2値のうちの他方の値であるか否かを判断する。第2のプロセッサは、1ライン全ての画素が他方の値であると判断されたとき、仮ラベル付処理と並行して、一方の値の画素が連結してなる連結領域の各画素に付与された仮ラベル番号を、連結領域毎に異なる本ラベル番号に置き換える本ラベル付処理を実行する。
(もっと読む)
積分値演算回路
【課題】インテグラルイメージを生成する際の遅延時間を縮小する。
【解決手段】直立型インテグラルイメージ生成回路41の演算器52は、輝度値の入力毎に、今回の入力輝度値R3と列和ラインバッファ50のうち今回の入力画素の列に対応するレジスタの記憶値R2とレジスタ51の記憶値R1とを加算して積分値を算出する。回転型インテグラルイメージ生成回路42の演算器65は、入力輝度値の入力毎に、レジスタ64の記憶値K1と積分値ラインバッファ60のうち入力画素より1画素分最大列側の列に対応するレジスタの記憶値K2と輝度値ラインバッファ62のうち入力画素の列に対応するレジスタの記憶値K4と今回の入力輝度値K5とを加算した値から、積分値ラインバッファ61のうち入力画素の列に対応するレジスタの記憶値K3を引くことで積分値(=K1+K2−K3+K4+K5)を求める。
(もっと読む)
画像処理装置
【課題】輝度の勾配の方向の回転角を含む回転角範囲を特定するための処理に要する時間を短くすることが可能な画像処理装置を提供すること。
【解決手段】装置100は、輝度の勾配の方向の回転角を含む象限を特定する特定部101と、基本象限に含まれる回転角範囲の中から入力値を含む正接の範囲に対応する回転角範囲を特定し、特定された回転角範囲を識別する出力値を出力する特定処理を実行する実行部102と、特定された象限が基本象限である場合、基本入力値を入力値として入力して特定処理を実行させ、出力値を、勾配の方向の回転角を含む回転角範囲を識別する識別値として取得する第1の取得部103と、特定された象限が基本象限以外の補助象限である場合、基本入力値を変換した値を入力値として入力して特定処理を実行させ、出力値を変換し、変換された出力値を識別値として取得する第2の取得部104と、を備える。
(もっと読む)
眼底撮像装置及びその制御方法
【課題】 走査型の眼底撮像装置は走査を行う為、撮像時間がかかり、時間の経過と共に眼球の動きの計測が困難又は精度が低くなるという問題があった。
【解決手段】 本発明は、計測光で眼底の撮像領域を走査することにより眼底画像を取得する眼底画像取得工程と、取得した眼底画像から特徴点を抽出する抽出工程と、撮像領域に特徴点を含む部分領域を設定する設定工程と、部分領域を計測光で走査することにより、部分領域の画像を取得する部分画像取得工程と、特徴点と部分領域の画像とに基づいてテンプレートマッチングを行い、眼底の動きを検出する検出工程とを有する。
(もっと読む)
計算装置および計算方法
【課題】ウインドウを用いて画像の評価値を算出する際に、処理時間の増大を回避しつつ、ウインドウの大きさの変更に容易に対応する。
【解決手段】ラスタスキャンの順番に従って移動するウインドウに含まれる複数の画素のそれぞれを示す複数の画素データのそれぞれに、当該画素のウインドウ内の位置に応じて相互に異なる複数の関数のそれぞれを適用することによって算出した複数の値の和をウインドウの位置毎に評価値として算出する計算装置であって、画像を構成する複数の画素のそれぞれを示す複数の画素データのそれぞれをラスタスキャンの順番に従って1つずつ受け付けて複数の関数のそれぞれを適用して複数の値のそれぞれを算出し、ウインドウに含まれる複数の画素のいずれかを示す画素データに、複数の関数のうち当該画素の当該ウインドウ内の位置に応じた関数を適用した値が算出される度に加算していくことにより、当該ウインドウの評価値を算出する。
(もっと読む)
撮影装置、撮影方法、およびプログラム
【課題】連続して撮影された複数の画像のそれぞれから抽出された複数の動体が合成された画像をより迅速に生成することができる撮影装置、撮影方法、およびプログラムを提供する。
【解決手段】シャッタボタンが押されたとき、そのときメモリに記憶されているプレビュー画像p1−pnが読み出され、プレビュー画像p1−pnに基づいて1枚の背景画像が生成される。また、撮影画像P1がメモリから読み出されたとき、撮影画像P1と背景画像との差が求められ、差がある画素からなる動体画像が撮影画像P1から抽出される。撮影画像P1から抽出された動体画像が背景画像に合成され、合成画像C1が生成される。
(もっと読む)
ラベル属性演算回路及び方法
【課題】システムクロックを上げることなく、ラベルIDテーブルの生成処理をスルーレートで処理する。
【解決手段】ラベルのIDが保持された二次元配列に対して、ラベルIDをラスタ走査して読み取るラベルIDリード部と、読み取ったラベルIDから認識されるオブジェクトの属性情報を演算する並列分散化された結果演算部と、その属性情報を一時格納する並列分散化されたラベルIDテーブルからなるラベルIDテーブル部と、並列分散化されたラベルIDテーブルに一時格納されている属性情報を積算する結果積算部とを具備することを特徴とするラベル属性演算回路。
(もっと読む)
特徴量算出装置及び識別装置
【課題】 解決しようとする課題は、特徴量を算出する際にメモリの並列性を効率的に利用しつつ特徴量を算出することにある。
【解決手段】
上記課題を解決するために、本発明の実施形態の特徴量算出装置は、入力データの特徴値のヒストグラムに基づく特徴量を算出する特徴量算出装置において、前記入力データの一部を保持するためのバッファと、複数のバンクを有し、前記ヒストグラムの算出結果を保持するためのメモリと、前記特徴値を算出しようとする対象データの前記バッファ上での位置と、算出された前記特徴値のカテゴリを投票する前記メモリ上の位置とが対応されたテーブルを生成する生成部と、前記対象データの前記特徴値のカテゴリを求め、前記テーブルが示す前記メモリ上の位置に投票を行う投票部とを備える。
(もっと読む)
画像処理装置
【課題】高解像度カメラおいて、認識対象領域を容易に設定できるようにする。
【解決手段】映像の解像度とフレームレートとを制御し、上限の解像度に制御された映像から移動物体の大きさを認識する。そして、この認識結果を基に、映像の解像度を決定する。さらに、この決定された解像度と、前記解像度で取り得るフレームレートの上限に制御された所定領域の映像から移動物体の移動速度を認識し、この認識結果を基に、映像のフレームレートを決定する。そして、決定されたフレームレートが、前記解像度で取り得るフレームレートの上限を超えた場合に、ユーザに警告を発する。
(もっと読む)
画像照合装置と画像形成装置および画像照合方法
【課題】 半導体メモリを用いることなく多数の画像パターンを登録でき、しかも登録した各画像パターンを速やかに取り出して入力画像と照合できる画像照合装置と画像形成装置および画像照合方法を提供する。
【解決手段】 入力画像データを単位ごとに抽出する。一方、エンドレスに直列接続した複数のシフトレジスタからなる画像パターン格納部53を設け、その各シフトレジスタに複数の画像パターンデータをそれぞれ格納し、これら画像パターンデータをクロック信号CLKに応じて順にシフトしながら1つずつ出力する。そして、上記抽出される1つの入力画像データと上記出力される各画像パターンデータとを照合部54で照合する。
(もっと読む)
画像識別装置、画像識別方法及びプログラム
【課題】画像内での特定画像領域の識別速度の高速化を図る。
【解決手段】画像表示装置100であって、画像から第1領域及び第2領域をそれぞれ生成する画像領域生成部3aと、第1領域の各々と識別用情報との類似度を評価値算出部3cにより算出させる第1算出制御部3dと、算出された類似度に基づいて、第2領域の各々のうち、識別用情報との類似度を評価値算出部により算出させる画像領域を指定する画像領域指定部3gと、指定された画像領域と識別用情報との類似度を評価値算出部により算出させる第2算出制御部3hと、第1算出制御部及び第2算出制御部のうちの少なくとも一方により算出された類似度に基づいて、画像内で特定画像領域を識別する顔識別部3iと、を備えている。
(もっと読む)
1 - 20 / 93
[ Back to top ]