
国際特許分類[B23Q5/38]の内容
処理操作;運輸 (1,245,546) | 工作機械;他に分類されない金属加工 (71,475) | 工作機械の細部;構成部分,または付属装置,例.倣いまたは制御装置;特定の細部または構成部分の構造により特徴づけられる工作機械一般;特定の結果を目的としない金属加工機械の組合わせ (8,929) | 駆動または送りのための機構;そのための制御装置 (419) | 工具または工作物を支持する部材の送り (242) | 工具または工作物を支持する他の部材,例.サドル,工具摺動台,の機械的伝達装置を介しての送り (77) | 連続的送り (43)
国際特許分類[B23Q5/38]の下位に属する分類
送り軸,例.親ねじ,によるもの (30)
可変速度比を持つもの
国際特許分類[B23Q5/38]に分類される特許
1 - 10 / 13
XYステージ機構
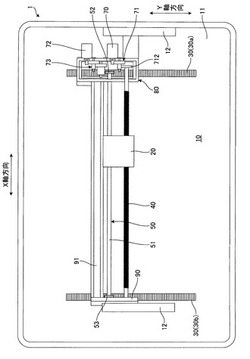
【課題】X軸搬送機構の両端側に駆動力を作用させることができ、部品点数を少なくすることができるXYステージ機構を提供する。
【解決手段】移動テーブル20を互いに直交する2方向に移動させるXYステージ機構であって、前記2方向のうち何れか一方の方向に沿って延在し、互いに平行に並べて設けた2つのラックギア30と、2つのラックギアの間に前記2方向のうち他方の方向に沿って延在して設けられ、かつ外周面に移動テーブルと係合する螺子溝を形成した棒状の部材であって、自身の中心軸回りに回転する場合に、移動テーブルの前記他方の方向に沿って移動させる送り部材40と、送り部材と平行に設けた棒状の部材であって、各々のラックギアと噛合うピニオンギア52,53を有して成り、自身の中心軸回りに回転する場合に、送り部材と一体的に前記一方の方向に沿って移動して移動テーブルを前記一方の方向に沿って移動させるガイド部材50とを備えた。
(もっと読む)
アクチュエータ

【課題】アクチュエータの幅方向の寸法を小さく設計することができ、更なる省スペース化を実現することができるアクチュエータを提供する。
【解決手段】長手方向に延びる基台と、前記基台に運動案内装置を介して前記長手方向に移動可能に取り付けられたスライダと、前記スライダを移動せしめる無端状のベルトと、前記基台に取り付けられると共に、前記ベルトを掛け回す一対の回転部材と、前記ベルトを駆動せしめる駆動部材と、を備えるアクチュエータにおいて、前記スライダは複数備えられると共に、前記長手方向に一列に配列される。
(もっと読む)
可動体駆動装置
【課題】可動体の両側に設けられた2つの駆動系を、1つのサーボモータによってタイミングベルトを介してタンデム駆動する可動体駆動装置を提供する。
【解決手段】両側に第1および第2の2つの駆動系20A、20Bを有する可動体13(67)と、2つの駆動系の間を小さな剛性を有する例えばタイミングベルト等の部材を介して回転連結装置48と、回転連結装置を介して2つ駆動系をタンデム駆動する1つのサーボモータ(30、80、90)とによって構成した。
(もっと読む)
XYステージ装置
【課題】 駆動時の反力による搬送ステージの揺れを未然に防止できるようにする。
【解決手段】 ベース21上に2本平行に配置して両端部をベース21外部の基礎19上の支持部材23に取り付けたX方向スライドバー22に、摩擦駆動機構25を備えたXステージ24を取り付ける。各Xステージ24の間に取り付けたY方向スライドバー26に、摩擦駆動機構28を備えたYステージ27を取り付けて、XYステージ装置を形成する。各Xステージ24とYステージ27を、摩擦駆動機構25,28の駆動ローラ31,37と各バックアップローラ32,38をスライドバー22,26の両側面に押し当てた状態で駆動させることで、Xステージ24駆動時の慣性によるYステージ27の揺れを防止させると共に、各ステージ24,27駆動時の反力は、Y方向スライドバー26と支持部材23を経て基礎19へ伝えることで、ベース21への影響を阻止させる。
(もっと読む)
工作機械テーブルの往復反転移動方法
【課題】 ベルト駆動により工作機械テーブルの左行・右行および反転移動を行うに反転時の衝撃を無くす、もしくは小さくする方法の提供。
【解決手段】 工作機械のテーブル4底面に設けられたベルト部材19に三相誘導電動機の回転運動を伝えてテーブルを左行・右行および反転させるにおいて、電子制御装置PLC、三相誘導電動機M1、インバータIv、エンコーダEcを用い、予め、テーブルの移動速度(Vt)、ストローク幅(Ls)、減速時間(td)、加速時間(ta)を電子制御装置PLCよりティーチ・インし、ついで、テーブルの移動を開始する。エンコーダEcのパルスカウント数によりテーブル位置を確認し、パルスカウント数が前記テーブル位置に一致したときにインバータのパルスを変えることにより三相誘導電動機の回転を変えて工作機械テーブルの反転を行う。テーブル反転時の三相誘導電動機の衝撃(FFT波形電流値幅)は小さく抑制される。
(もっと読む)
垂直軸送り装置
【課題】重力バランサーの設置エリアが小さく、重力バランサーの取付位置に制限が少なく、限界加速度が大きい、産業用ロボットや工作機械の垂直軸送り装置を得ること。
【解決手段】工具を保持する垂直軸1と、該垂直軸1を上下動可能に保持するコラムと、該コラムに反力をとって前記垂直軸1を上下動させる推進装置13と、を備える垂直軸送り装置において、前記垂直軸1とコラムのいずれか一方に取付けたラック16aと、該ラック16aと噛合うピニオン16bと、前記垂直軸1とコラムの他方に取付けられ前記ピニオン16bに回転トルクを与えるサーボモータ15と、前記推進装置13を制御するとともに、前記垂直軸1の重力が前記ピニオン16bに負荷する回転トルクと略バランスする逆回転トルクを前記サーボモータ15に発生させる制御装置20と、を備える。
(もっと読む)
リニアガイド
【課題】
リニアガイドを少ない据付け作業にて設置し、機能的に信頼できる方法で、十分な変位長さを得る。
【解決手段】
2個の固定支持されるガイドバー(4)を含むリニアガイド(1)> において、ガイドバー(4)に据付けたガイドブロック(5)は駆動ユニットの作用によりガイドバー(4)に対して長手方向に相対移動する。駆動ユニットは、ガイドバー(4)と平行に延出する歯付きラック(9,10)の歯と噛み合う小歯車(16)を含み、歯付きラック(9,10)は前後端(11)のみが据え付けられる。小歯車(16)に割り当てられる案内要素(12)は、歯付きラックの長手方向に変位可能であるように、ガイドブロック(5)に据え付けられ、案内要素(12)はその歯付きラックに、嵌合するように支持される。
(もっと読む)
往復動テーブル
【課題】往復動テーブル本体の往復動のストロークを大きく採れるようにすると共に、高速化が可能となるようにし、しかも往復動テーブル本体の振動を押えることができるようにした、往復動テーブルを提供する。
【解決手段】同期して互いに反対する方向へ同速度で同ストローク移動し得るようにした往復動テーブル本体14及びカウンタウエイト18と、往復動テーブル本体14の移動方向他端側Bに設けられ、往復動テーブル本体14により引っ張られて伸長されるか、若しくは往復動テーブル本体14から力を受けて圧縮されるコイルバネ27と、カウンタウエイト18の移動方向他端側Bに設けられ、カウンタウエイト18から力を受けて圧縮されるか若しくはカウンタウエイト18により引っ張られて伸長されるコイルバネ28を設ける。
(もっと読む)
摩擦駆動搬送装置の駆動機構
【課題】 搬送テーブルの高速移動と、位置決め分解能の高い低速移動を実施できるようにする。
【解決手段】 駆動モータ8の出力軸8aに、ローラ支持フレーム10を、出力軸8aの回転と独立して旋回可能に取り付ける。ローラ支持フレーム10のテーブル移動方向の一端部に支持した高速側動力伝達軸12に、出力軸8a上の出力ローラ11に接触させる高速側減速ローラ13と、大径の高速側駆動ローラ14を取り付ける。テーブル移動方向の他端部に支持した低速側動力伝達軸15に、出力ローラ11に接触させる低速側減速ローラ16と、小径の低速側駆動ローラ17を取り付ける。ローラ支持フレーム10を旋回させることで、高速側駆動ローラ14がスライドバー2に接する状態と、低速側駆動ローラ17がスライドバーに接する状態とを切り替えて運転させる。
(もっと読む)
摩擦駆動搬送装置の駆動機構
【課題】 搬送テーブルの大きな推力と、高精度の位置決めを両立させる。
【解決手段】 搬送テーブルに設けた駆動モータ6の出力軸6aに、踏面7aがフラットな小径の出力ローラ7を取り付ける。上下方向の動力伝達軸8の上部に、踏面9aがフラットな大径の中間ローラ9を取り付けて、出力ローラ7に接触させる。動力伝達軸8の下部に、大径の駆動ローラ10を取り付けて、ローラクラウンを有する踏面10aを、スライドバー2に接触させる。駆動モータ6の回転を、出力ローラ7と中間ローラ9の径の比に応じて減速させた後、駆動ローラ10へ伝えることで、位置決め分解能を向上させる。
出力ローラ7と中間ローラ9の間は、フラットな踏面7a,9a同士を接触させることで大きな接触面積を確保させ、駆動ローラ10とスライドバー2の間は、駆動ローラ10を大径とすることで、大きな接触面積を確保させる。
(もっと読む)
1 - 10 / 13
[ Back to top ]