
国際特許分類[B25J1/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | 手によって操作されるマニプレータ (64) | 関節のあるまたは可撓性のあるもの (9)
国際特許分類[B25J1/02]に分類される特許
1 - 9 / 9
マニピュレータ
【課題】開閉するエンドエフェクタを機械的に駆動操作する操作部における操作性を向上させる。
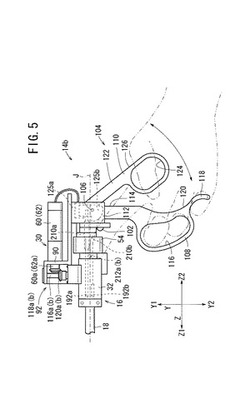
【解決手段】マニピュレータ10は、グリッパ軸入力部104を含む操作部14bと、エンドエフェクタ1300の向きを変える1以上の姿勢軸を含む先端動作部12と、操作部14bと先端動作部12を連結する連結シャフト18と、姿勢軸を駆動するモータ60、62と、グリッパ軸入力部104の人手による操作を機械的に伝達して、エンドエフェクタ1300を駆動するエンドエフェクタ駆動機構1320aとを有する。グリッパ軸入力部104は、開閉軸106を基準にして開閉する第1指掛部108及び第2指掛部110を備える。第1指掛部108は固定され、第2指掛部110が第1指掛部108に対して相対的に開閉動作し、第1指掛部108と第2指掛部110が閉じることによってエンドエフェクタ1300が閉じる。
(もっと読む)
動作補助具

【課題】簡単な構造で伸縮自在な帯体を有し、必要なときは帯体を伸ばして離れた所に位置する物体を容易に取ることができ、不要なときは小形化して携帯することができる動作補助具を提供する。
【解決手段】第一第二の帯体26,34の先端部に取り付けられた取付部材28と、取付部材28に着脱可能に連結された付け替え可能な作業部材29を備える。ケース12は、第一帯体26を巻き回した第一回転ドラム24を収容した第一収容部14と、第一収容部14から第一帯体26を外側に引き出す第一開口部18を備える。さらにケース12は、第二帯体34を巻き回した第二回転ドラム32を収容した第二収容部16と、第二収容部16から第二帯体34を外側に引き出す第二開口部20を備える。第一開口部18と第二開口部20は、同方向に向かって開口している。
(もっと読む)
屈曲機構
【課題】特に棒体などであって、屈曲動作を必要とする物体の、その屈曲機構につき、構成の簡単なものを提供すること。
【解決手段】鋼管10の一端に、その外径と略等しい外径の間隔コイルスプリング1の一端を固着し、その間隔コイルスプリング1の隣接コイル線1a間に第二の間隔コイルスプリング2のコイル線2aを割り込ませて、間隔コイルスプリング1の圧縮を阻止する。圧縮が阻止されていない領域にはワイヤ4を挿通し、そのワイヤ4の一端を間隔コイルスプリング1の自由端に固定し、他端を、前記鋼管10の他端に接続したワイヤ4の引っ張り機構6に接続する。その引っ張り機構6でワイヤ4を引っ張ると、間隔コイルスプリング1の、圧縮が阻止されていない他方の領域が軸方向に圧縮されて全体が屈曲し、引っ張り力を開放すると、スプリングの復元力で元の真直姿勢に復帰する。
(もっと読む)
マニピュレータ
【課題】作業部のロール動作の操作が容易で、短時間のトレーニングで操作の習得が可能なマニピュレータを提供する。
【解決手段】マニピュレータ10は、人手で把持される操作指令部14と、該操作指令部14に設けられ、指で操作される複合入力部34と、操作部から延在する連結シャフト48と、該連結シャフトの先端に設けられた作業部12とを有する。作業部12は、ヨー回動機構、ロール回転機構及び開閉機構を有する。複合入力部34は、ロール回転機構を駆動するシャトルリング100と、ヨー回動機構を駆動するパッド132とを有する。シャトルリング100は、回動部材であって、左右に設けられた2つのノブ110a、110bを有する。パッド132はシャフトリング100の内側に設けられている。
(もっと読む)
関節(7)を設けた指(2)を拡大縮小できるリーチャー
【課題】指に設けられた関節の角度を調節可能なリーチャーを提供すること。
【解決手段】(イ)硬質製パイプの腕(3)の先端に関節(7)を設けた3本の弾力製パイプの指(2)を取り付け、腕(3)の反対側にレバー(5)を設けた握り手(6)を取り付ける。(ロ)弾力製パイプをV字型にカットし関節(7)を作り、指先(1)の内側にワイヤー(4)の片端を固定し、弾力製パイプの指(2)と硬質製パイプの腕(3)の中を通しレバー(5)に固定する。(ハ)腕(3)にアジャスターロック(9)を設けたアジャスター(10)をはめ、アジャスター(10)と関節(7)の根元とをスポーク(8)で接続した。本発明は、以上を特徴とするリーチャーである。
(もっと読む)
マニピュレータ装置
【課題】処置部の位置決め操作と姿勢決めの互いの操作による干渉の影響が少なく、操作性、信頼性、安全性の高いマニピュレータ装置を提供すること。
【解決手段】アーム部231の先端側に設けられ、処置具213をピッチ軸廻り及びヨー軸廻りに回動自在に支持する作業部210と、アーム部231の基端側に設けられた操作部220と、アーム部231内に設けられ、操作部220における操作力を作業部210に伝達する駆動力伝達部とを具備し、操作部は、その軸方向がアーム部231の中心軸Qに軸方向に交差するように配置されるとともに、アーム部231の基端側に取り付けられたブラケット221に対し操作桿軸P廻りに回転自在に支持された操作桿222と、操作桿222に設けられ、処置具213の処置動作、ピッチ軸廻り及びヨー軸廻りの回動動作を行わせるための操作デバイス223を備えている。
(もっと読む)
物品拾い上げ装置
【課題】確実かつ容易に水没した物品を拾い上げる。
【解決手段】物品拾い上げ装置2は、アウターチューブ3の内部に芯線4が進退動自在に収容された可撓性を有するワイヤ5と、このワイヤ5の一端に設けられた掴み部6と、このワイヤ5に遊びを持たせて緩装された案内部7と、ワイヤ5の他端に設けられ芯線4を介して掴み部6を開閉動作させる操作部8とを備えている。掴み部6は、本体10に固定された固定爪11と、本体10に枢支さればね15により常時閉状態に弾発付勢されるとともに芯線4に接続され、開閉動作される可動爪14とを備えている。操作部8は、握り枠30と、両端がこの握り枠30の内側に形成された案内溝33、33に係止され案内溝33、33に沿って進退動するとともに芯線4に接続される操作ロッド34とを備えている。
(もっと読む)
遠隔操作用ボルト供給工具
【課題】形状を変化可能なアーム管1の一端に操作部3を設け、他端にボルト頭配設部8を設け、操作部3の操作によりボルト頭配設部8の開口の上方をボルト頭押え片13が移動するようにし、1人の作業者で無線鉄塔の足場に網板を取り付け可能にする。
【解決手段】可撓性及び形状保持性を有するアーム管1の一端にレバー19を設け、他端にはボルト頭配設部8を凹設している。ボルト頭配設部8の内側壁には複数の条溝9を設け、ボルトがボルト頭配設部8内で回転しないようにしている。ワイヤ2はアーム管1内を挿通し、一端にはレバー19を取り付け、他端にはボルト頭押え片13を取り付けている。ボルト頭押え片13はレバー19の操作により、ボルト頭配設部8の開口上方を出入動するようにしている。
(もっと読む)
アニマトロニクス制御支持式歩行システム
1形態として、ロボット歩行形象物と、ロボット歩行形象物を少なくとも部分的に支持する車輪付き支持体からなる支持式歩行システムが開示されている。支持式歩行システムは、人間のオペレータによって駆動されそして制御される。上記歩行システムが、種々の速度で駆動しかつ回動する間に、前方へ、後方へ、そして側方へカートの運動と同期してステップを進めるように、コンピュータアルゴリズムがロボットの歩行機能を自動的に制御する。 (もっと読む)
1 - 9 / 9
[ Back to top ]