
国際特許分類[B25J19/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | マニプレータに適合する付属装置,例.監視のための,探知のための;マニプレータと関連して使用するために結合または特に適用される安全装置 (1,619) | センサー (345)
国際特許分類[B25J19/02]の下位に属する分類
視覚装置 (136)
国際特許分類[B25J19/02]に分類される特許
1 - 10 / 209
歩行ロボットの反発力測定モジュール及びその測定方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
検出装置、電子機器及びロボット
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
検出装置、電子機器及びロボット
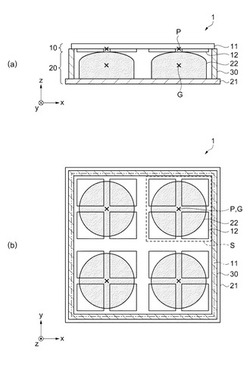
【課題】外力を高い精度で検出する検出装置を提供する事。
【解決手段】外力を検出する検出装置1は、基準点Pの周りに圧力センサー12を複数個配置した第一基板10と、突起22を有する第二基板20と、を備える。第一基板10は可撓性を有する。突起は22、基準点Pと重なる位置に重心Gが位置し、先端部が圧力センサー12に当接する様に配置されている。第一基板10が外力に応じて変形するので、外力の大きさと方向とを高い精度で検出する検出装置1を提供する事ができる。
(もっと読む)
測定装置、動作補助ロボット、測定方法、および、測定装置用プログラム

【課題】歩行補助ロボットの装着の状態や、被補助者の姿勢により影響を受けにくいように、歩行パターンを制御するために必要な連続歩行時の股関節角度を測定する測定装置等を提供する。
【解決手段】被補助者60の歩行動作を補助する動作補助ロボットSが取り付けられた被補助者の股関節角度を測定する測定装置において、被補助者の股関節から上部の腰部の姿勢角θHUを予め取得し(S1)、被補助者の腰部に取り付けられた動作補助ロボットの取付角θRUを予め取得し(S2)、動作補助ロボットの腰部と、股関節から下部の下肢部に取り付けられた動作補助ロボットの下肢部との角度であるロボット股関節角度θRを検出し、ロボット股関節角度に応じて、腰部の姿勢角および取付角から、歩行動作を行う被補助者の股関節角度θHを求める(S3)。
(もっと読む)
外力検知装置、ロボット制御システム及び外力検知方法
【課題】 力覚センサーの先に設けられた機械機構により外力が変調される場合に、精度の高い外力検知を行う外力検知装置、ロボット制御システム及び外力検知方法等を提供すること。
【解決手段】 外力検知装置30は、力覚センサー10から出力されたセンサー情報を取得する取得部32と、取得したセンサー情報に対して補正処理を行う補正部34とを含み、力覚センサー10には、外力fを変換して力Fとして力覚センサー10に伝達する機械機構(ハンド110等)が設けられ、補正部34は機械機構での変換の逆変換を補正処理として行う。
(もっと読む)
姿勢角度演算装置、姿勢角度演算方法、及びプログラム
【課題】低コストかつ高精度に姿勢角度を算出すること。
【解決手段】姿勢角度演算装置は、角速度を検出するジャイロセンサ及び加速度を検出する加速度センサを備え、ジャイロセンサにより検出された角速度と、加速度センサにより検出された加速度と、に基づいて姿勢角度を算出している。ジャイロセンサ及び加速度センサのうち少なくとも一方は、同一箇所及び同一方向を計測する、計測域の異なる複数のセンサで構成されている。姿勢角度演算装置は、計測域の異なる複数のセンサから夫々出力される信号に基づいて、姿勢角度を算出する姿勢角演算手段と、を備えている。
(もっと読む)
把持用センサ及びロボットハンド駆動制御装置
【課題】部品点数を削減することのできる把持用センサ及びロボットハンド駆動制御装置を提供する。
【解決手段】把持用センサ10は、厚肉部14に取り囲まれた空洞部16と、空洞部16を架橋して厚肉部14上に形成されたメンブレン18を有する基板12と、メンブレン18の一面12a上に、下部電極32、圧電体膜34、上部電極36の順に積層形成された圧電素子30と、を備える。互いに電気的に分離された複数の圧電素子30のうち、一部の圧電素子30の上部電極36上に、電気絶縁性材料からなる突起部38が形成され、突起部38を有する圧電素子30は、垂直圧力を検出するための垂直圧力検出素子40とされている。また、垂直圧力検出素子40とは別の圧電素子30として、超音波の送信及び超音波の受信の少なくとも一方に用いられる超音波素子42を有し、該超音波素子42は、少なくとも基板12の空洞部16上に設けられている。
(もっと読む)
検出装置、電子機器及びロボット
【課題】外力の方向を高い精度で検出することが可能な検出装置、電子機器及びロボットを提供する。
【解決手段】基準点Pの周りに複数配置された第1容量電極12を有する第1基板10と、第1容量電極を挟んで第1基板と対向配置された第2基板20と、第1基板と前記第2基板との間に配置された弾性体若しくは流体からなる誘電体と、第1基板と第2基板との間において誘電体を挟んで第1容量電極と対向配置された第2容量電極22と、基準点Pと重なる位置に重心が位置するとともに外力によって頂部が第2基板に当接した状態で弾性変形する円錐台または角錐台形状を有する弾性体突起32を備える。
(もっと読む)
接触センサー、ロボットハンド及びロボット
【課題】検出部が設置された場所以外でも物体が接触した場所を検出することができる接触センサーを提供する。
【解決手段】液体12が内在し液体12の流れる方向を規制し柔軟な面を有する容器11と、容器11内に設置され液体12が流れる方向を検出する流れ方向検出部7と、を備え、流れ方向検出部7が複数設置されている。
(もっと読む)
関節角度測定装置及び関節角度測定方法
【課題】人体の関節角度を計測する装置において、ノイズなど様々な要因によって蓄積される誤差の解消を行う。
【解決手段】本発明に係る関節角度測定装置は、関節を挟んでユーザーの肢体の一方に装着される第1支持部に設けられた第1関節角度検出用センサーと、関節を挟んで肢体の他方に装着される第2支持部に設けられた第2関節角度検出用センサーの出力に基づいて関節角度を検出する関節角度検出処理と、第1支持部と第2支持部が所定位置関係にあることを所定時間継続して検出した場合、第1角度検出用センサーと第2角度検出用センサーに基づいて検出される関節角度を、所定位置関係に対応する関節角度に修正する関節角度修正処理を実行することを特徴とする。
(もっと読む)
1 - 10 / 209
[ Back to top ]