
国際特許分類[B60G1/04]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両懸架装置 (7,837) | 車軸とフレーム間が固着された懸架装置 (78) | 分離した車軸をもつもの (4)
国際特許分類[B60G1/04]に分類される特許
1 - 4 / 4
リーチ式フォークリフトおよびサスペンション機構
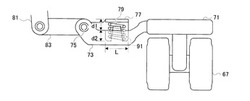
【課題】従来よりも、運転席の床面を低くすることのできるリーチ式フォークリフトを提供する。
【解決手段】キャスタリンク部73の一部分Lが、キャスタタイヤ67と接触しない領域において下方向にオフセットされ、こうしてオフセットされた部分Lに弾性部材79が配置されている。そのため、キャスタタイヤ67の上方領域として運転席4との間に確保しておくべき高さを、揺動制限部77および弾性部材79における上下方向の高さからオフセットされた分だけ相殺した高さとすればよくなる。これにより、キャスタリンク部73をオフセットさせていない場合と比較して、キャスタタイヤ67上方において確保しておくべき領域が小さくてもよくなるため、その分だけ、運転席4の床面を低くすることができる。こうして、運転席4の床面を低くすることにより、フォークリフト1における乗降のし易さを向上させることができる。
(もっと読む)
車両のローリング挙動制御装置

【課題】構成物の横変位により操舵時のローリング挙動を抑制する際、横変位の反作用によって、操舵に伴うローリング挙動が許容限界を超えることのないようにする。
【解決手段】ローリング制御用可動構成物の横変位量制御が開始されたとき、先ず車両状態検出部21で操舵角θ、車輪速ω、ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φを検出する。次に、可動構成物変位量目標値算出部22で、上記の操舵角θおよび車輪速ωを用い、操舵周波数が高いほど小さくなるような可動構成物のローリング挙動変化抑制用目標横変位量を演算する。その後可動構成物駆動部23で、上記可動構成物の目標横変位量と、上記ヨーレートΦ、前後加速度αxT、横加速度αyT、およびモータ回転角φとから、可動構成物の目標横変位量を実現するのに必要なモータ駆動トルク指令値を算出し、これをモータ用サーボドライバへ出力する。
(もっと読む)
トー角・キャンバー角可変機構
【課題】 トー角とキャンバー角の変更を簡単な構造で可能とするトー角・キャンバー角可変機構を提供する。
【解決手段】 ホイール6の回転中心と前記ホイール6の外周に設置されたタイヤ7の幅を二等分する面との交点をホイール中心Cとして、ホイール6のトー角及びキャンバー角を変更可能であることを特徴とする。
(もっと読む)
横方向に傾倒する四輪車両
本発明は車輪付き車両、特に自動化された道路車両に関する。車輪付き車両(10)は、車輪(18,20)を支持するための2つのフレーム(12)を有しており、フレーム(12)は横方向に間隔を置いて配置されている。各フレーム(12)には、このフレーム(12)を地面において支持するための1対の車輪(18,20)が取り付けられており、各対の車輪(18,20)は、関連するフレーム(12)に沿って間隔を置いて配置された作動的にほぼ水平な回転軸を中心に回転するように取り付けられている。モータ(36)は、各車輪付きフレーム(12)においてドライブトレイン(48,28,30,32)によって後輪(20)に接続されている。車輪付きフレーム(12)は、垂直に対して同期的に傾倒するように結合されており、これにより、フレーム(12)の横方向傾倒に応じて全ての車輪(18,20)の傾斜角が変化する。 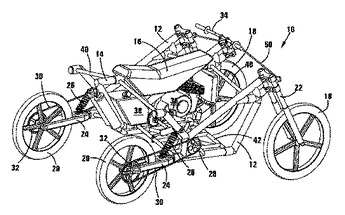 (もっと読む)
(もっと読む)
1 - 4 / 4
[ Back to top ]