
国際特許分類[B60K31/02]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両の推進装置または動力伝達装置の配置または取付け;複数の異なった原動力の配置または取付け;補助駆動装置;車両用計装または計器板;車両の推進装置の冷却,吸気,排気または燃料供給に関する配置 (25,396) | 車両速度を自動的に制御する車両付属品であって,単一のサブユニットのみに作用するもの,すなわち,車両速度が任意に設定した速度を越えるのを防止し,または車両運転者が選択した特定の速度に車両速度を維持するもの (795) | 電気的に作動されるサーボ機構を含むもの (5)
国際特許分類[B60K31/02]の下位に属する分類
一つの電気量,例.電圧,パルス,波型,磁束等を同種の他の量と比較するための装置,比較装置は制御装置に送り込まれる電気的信号の発生を含む
国際特許分類[B60K31/02]に分類される特許
1 - 5 / 5
車速制限制御装置

【課題】車速制限制御に用いる制限車速を大きく変更しなければならない場合であっても、簡単な操作で、その変更を行うことが可能な車速制限制御装置を提供すること。
【解決手段】複数の制限速度を記憶可能な記憶装置3を有し、運転者によって操作される選択操作スイッチにより、車速制限制御に用いる制限速度VLとして、記憶装置3に記憶された複数の制限速度VMの中からいずれかの制限速度を選択する。このため、制限速度VLを大きく変更しなければならないような状況においても、予め、変更後の制限速度に対応する制限速度を記憶装置3に記憶させておくことで、その記憶した制限速度を選択するという簡単な操作で、制限速度VLの変更を行うことが可能となる。
(もっと読む)
車両用運転支援装置

【課題】勾配路での変速機のダウンシフトが行われない場合にも、ブレーキの自動介入時間を増加させることなく良好な車速制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット5は、ACCの実行中にブレーキの自動介入制御が設定時間t0以上継続したことを判定したとき、目標加速度aを予め設定された負側の値Bまで変化させ、変化させた目標加速度aを、基本目標加速度a0が正側の設定値a0thを越えるまでの間維持する割込制御を行う。
(もっと読む)
車両運転支援システム、運転支援装置、車両及び車両運転支援方法
【課題】危険走行領域を回避して交差点で安全に車両を停止させ又は通過させる車両運転支援システム、運転支援装置、車両及び車両運転支援方法を提供する。
【解決手段】車載装置は、自車両の停止線までの距離、自車両の速度及び信号情報に基づいて、算出した停止条件及び進入条件で画定される交差点通過領域又は交差点進入領域であって、赤信号時に危険な走行状態となる所定の特定状態(対向危険走行領域又は錯綜危険走行領域にある状態)にあるか否かを判定する。車載装置は、危険走行状態にあると判定した場合、危険走行状態を回避するために、例えば、車両を停止線に停止させる場合には、車両を緩やかな減速度で減速するための処理を行い、あるいは、車両を交差点に進入させる場合には、車両を緩やかな加速度で加速するための処理を行う。
(もっと読む)
車両の運転のための調整戦略をサポートするための方法及び装置
本発明は、車両の運転のための調整戦略をサポートするための方法、装置、及びコンピュータ・プログラム製品、並びにそのような装置を備える自動車両に関する。本方法によれば、入力値Δvに基づいて、ターゲット車両について複数の加速度値aが特定され(36)、それらの入力値は、車両とターゲット車両の間の距離について検出された距離値である、又はそれらの距離値から導出される。その後、加速度値は、ターゲット車両の特徴を示すデータCDを得るために処理される(40)。その後、ターゲット車両の特徴を示すこれらのデータは、車両の運転を調整する(44)ために引き渡される(42)。 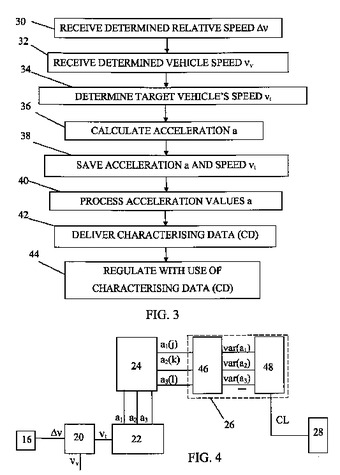 (もっと読む)
(もっと読む)
レーダシステム、物標検知プログラム、及び物標検知方法
【課題】検知される物標に重み付けをする優先検知範囲を操舵角に基づいて設定するレーダシステムにおいて、かかるレーダシステムを搭載した車両が左右方向に傾斜した直線道路を走行する際に、実際の進行路前方の先行車両を的確に検知する。
【解決手段】
自車両の操舵角に対応する進行路のカーブ半径を求め、自車両が走行する走行路面の左右方向の傾斜角に応じて異なる補正量により前記カーブ半径の値を増加させる補正を行うカーブ半径算出手段と、前記補正されたカーブ半径に対応する進行路前方の物標との相対距離または相対速度をレーダ波の反射波信号に基づいて検知する物標検知手段とを有するレーダシステムにより、補正されたカーブ半径に対応する自車両の進行路を求める。よって、傾斜角の増大にともないカーブ半径が減少しても、減少したカーブ半径を補正でき、実際の進行路前方の物標を検知することができる。
(もっと読む)
1 - 5 / 5
[ Back to top ]