
国際特許分類[B60L9/16]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 車両の外部から動力を供給する電気的推進装置 (1,257) | 交流誘導モータを用いるもの (1,235)
国際特許分類[B60L9/16]の下位に属する分類
直流供給線から給電するもの (1,160)
交流供給線から給電されるもの (40)
異なった種類の動力供給線から給電されるもの (10)
国際特許分類[B60L9/16]に分類される特許
1 - 10 / 25
電気車制御装置
【課題】試行錯誤的な調整を行う必要なく、再粘着を確実に実現できる適切なトルク引き下げ量の決定が可能な電気車制御装置を提供する。
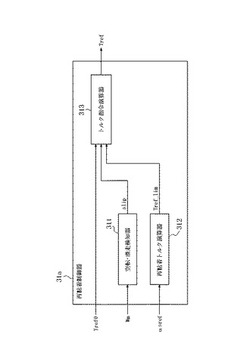
【解決手段】電気車両の主電動機を制御する電気車制御装置において、車輪の空転・滑走を検知する空転滑走検知器311と、車輪とレールの間の速度差の変化率であるすべり加速度の指令値であるすべり加速度指令αsrefに基づいた再粘着トルクTref_limを出力する再粘着トルク演算器312と、空転・滑走を検知したときには、再粘着トルクTref_limを出力するトルク指令値演算器313と、を有し、すべり加速度を制御する。
(もっと読む)
車両用半導体冷却装置

【課題】受熱ブロックの半導体取付面における温度バランスを良くし、冷却性能を向上することができる車両用半導体冷却装置を提供する。
【解決手段】車両用半導体冷却装置は、受熱ブロック、複数の半導体素子の列、放熱部材を備える。前記受熱ブロックは第1の面とこの第1の面の反対側に第2の面とを有する。前記複数の半導体素子の列は、前記受熱ブロックの第1の面に、発熱量が互いに異なる半導体素子の列どうしが交互に配置されている。前記放熱部材は前記受熱ブロックの第2の面に、長手方向端部が車両進行方向に一致するように配設されている。
(もっと読む)
空転滑走発生検出方法及び電動機制御装置
【課題】回転検出信号に含まれるノイズ成分の除去と、時間遅れの削減との両者のバランスを図った新たな再粘着制御手法を提案すること。
【解決手段】空転滑走検出用加速度検出部612により検出された加速度α1と、回復検出用加速度検出部622により検出された加速度α2と、速度差Vdとを用いて空転滑走を検出する。比較器614,619による判定のみで安全が確保される場合、或いは別途の安全対策が施されている場合には、比較器615,616、論理和部618を不要としてもよい。
(もっと読む)
車両用制御装置
【課題】誘導電動機に供給される電圧と電流から誘導電動機の加速度を演算して、車輪の空転を抑えながら加速する場合、低速度域において、空転の誤検知が発生して必要以上にトルクを引き下げるという問題点がある。
【解決手段】検出速度が設定値Aより小さい場合は検出速度を選択し、設定値Bより大きい場合は演算速度を選択し、設定値Aより大きく設定値Bより小さい場合は重み付けして速度を出力する速度選択部を備える。一次角周波数ωが0に近いときは検出速度から加速度を演算し、一次角周波数ωが大きいときは演算速度から加速度を演算することができるため、全速度域で空転検知ができる。
(もっと読む)
電気車制御装置
【課題】PMSMのγ,δ軸電流の振動や機械的な振動に起因した加速度推定の遅れを低減する。
【解決手段】PMSM4を駆動するインバータ部3の電圧指令値と電流検出値とから回転子の位置誤差を推定する位置誤差推定部31、及び、位置誤差推定値から回転子位置推定値を演算する位相推定部25Aを有し、トルク指令値及び回転子位置推定値に基づいてベクトル制御を実行するセンサレスベクトル制御部2Aと、前記位置誤差推定値に基づいてPMSM4の加速度を推定する加速度推定部32と、この加速度推定部32により生成された加速度推定値に基づいて車輪とレールとの間の空転状態を推定し、前記トルク指令値を調整するための加減速トルクを生成する空転滑走制御部7Aと、を備える。
(もっと読む)
電動機制御方法及び電動機制御装置
【課題】空転滑走した軸とは異なる他軸における空転滑走の誘発を抑制させ、牽引力増大を図るための新たな方策を提案すること。
【解決手段】監視軸の軸速度Vから基準速度Vmを減算した速度差Vdが予兆時誘発検出閾値Vca以上となったことを検出する(誘発検出)。予兆時誘発検出閾値Vcaは、空転滑走検出閾値Vsより小さい値であり、時刻t5の時点で予兆時誘発検出がなされる。また、再粘着制御において、一旦引き下げた電動機トルクτeをもとのトルク(或いはもとのトルクをもとに定められる目標トルク)に復帰させる際にも、軸重移動が生じて他軸での空転滑走が誘発し得る。そこで、空転滑走を検出した時のトルク分電流から現在のトルク分電流を減算したトルク分電流の差が、復帰直前時誘発検出閾値τcr以下となったことを、他軸における空転発送の誘発可能性ありとして検出する(誘発検出)。
(もっと読む)
電気車駆動システム
【課題】誘導電動機により車輪を駆動する電気車駆動システムにおいて、コンピュータ制御を用いずに自動的に空転の抑制ができ、編成全体での加速度低下が生じない電気車駆動システム。
【解決手段】編成前方の車両の誘導電動機と編成後方の車両の誘導電動機を電気的に並列接続する。あるいは、前後離れた車両に搭載された複数の電力変換回路を、全ての電力変換回路から流れる電流の平均から演算した値を用いて推定速度及び制御を行い同一の電圧振幅及び周波数で運転する。
(もっと読む)
電気駆動車両
【課題】坂道において電気駆動車両の発進及び停止を行う時に機械式ブレーキと電動機の協調制御を行うことなく、後退することのない発進及び停止を実現する。
【解決手段】本発明の電気駆動車両は、車輪を制動あるいは駆動するための誘導モータと前記誘導モータを制御する電動機制御器と前記車輪を制動する機械式ブレーキを備え、前記車両が前記機械式ブレーキが作動していない状態で停止している時は前記電動機制御器が前記誘導モータの固定子に直流電圧または−1〜+1Hzの間にある周波数の交流電圧を印加し、前記車両を停止させるトルクを前記誘導モータに発生させて前記車両を停止状態で維持する。
(もっと読む)
車両の走行用モータ制御装置
【課題】車両の走行用モータ制御装置において、レゾルバの形状ばらつき等により該レゾルバの出力波形歪みがあっても回転角度検出精度の低下を抑えて走行用モータの良好な制御性能を確保する。
【解決手段】走行用モータの回転角度センサとしてレゾルバを備えた車両に用いられる走行用モータ制御装置は、レゾルバ13から出力される回転検出信号Sa,Sbから、角度出力値φを求めるRDC(Resolver Digital Converter)35を備え、その角度出力値φに基づいてモータへの通電を制御する。そして、RDC35は、回転検出信号Sa,Sbと現在の角度出力値φとから「sin(θ−φ)」を制御偏差εとして求め(θはレゾルバの電気角)、そのεにゲイン(=Ka・Kb)を乗じた値を角加速度として求めて、それを2回積分して次の角度出力値φを求めるが、モータが等速度回転状態であると判定すると上記ゲインを減少させるゲイン制御部53を有している。
(もっと読む)
電気車補助電源装置
【課題】装置の大型化および複雑化を招くことなく、エネルギーの利用効率が高い電気車補助電源装置を提供する。
【解決手段】バッテリ43は、インバータ42の直流入力側、すなわちコンバータ41の直流出力側に接続され、コンバータ32から主電動機31へ供給される直流電力に比較して電圧の低いコンバータ41からインバータ42へ入力される直流電力によって充電される。そのため、バッテリ43は、専用のDC/DCコンバータを用いることなく、コンバータ41から出力された直流電力によって直接充電または放電が制御される。
(もっと読む)
1 - 10 / 25
[ Back to top ]