
国際特許分類[B60T8/174]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | 特殊な制御理論の使用に特徴を有するもの,例.ファジー理論 (37)
国際特許分類[B60T8/174]に分類される特許
1 - 10 / 37
電動パーキングブレーキ装置
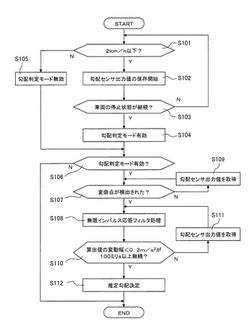
【課題】路面の勾配に応じた荷重の目標値を短時間で決定可能な電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置は、パーキングブレーキと、アクチュエータと、勾配センサと、荷重センサと、制御部と、を有している。制御部は、アクチュエータ目標荷重値を決定する荷重値決定と荷重センサの出力に基づいてアクチュエータによる荷重がアクチュエータ目標荷重値まで到達するようにアクチュエータを制御する駆動制御とを行う。制御部は、荷重値決定において、勾配センサからの勾配値の時系列における変曲点を判定し、変曲点以降の勾配値の時系列と予め定められたフィルタ係数とに基づいて、勾配値の収束値を推定することにより推定勾配を算出するフィルタ処理を行い、推定勾配に基づいてアクチュエータ目標荷重値を決定する。
(もっと読む)
車両用情報処理装置

【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
(もっと読む)
車両用の電子制御システム及び車両システムで運転者に依存しない少なくとも1つの介入を算出する方法
【課題】車両が物体との衝突を回避する電子制御システム及び方法を提供する。
【解決手段】リスクコンピュータによって、車両システムへの運転者に依存しない少なくとも1つの、しかしながら特に多数の介入を算出する方法。プリセットされている車両データ,環境データ,実際の車両及び運転者のデータ,車両内外の人のデータ等が、このリスクコンピュータの入力部に入力される。このリスクコンピュータは、これらのデータに基づいて車両とこの車両の内側及び外側にいる人との危険状況を評価しこの評価及び場合によってはその他の基準値又は重み付けに応じて、アクチュエータを制御する制御信号を出力する。人及び車両に対する最大の保護作用が、優先回路にしたがって得られるように、これらのアクチュエータは、車両の運転者の行動及び/又は乗客の保護及び/又はその他の道路使用者(歩行者,自転車に乗る人等)に対する保護手段を変更又は起動する。
(もっと読む)
運転支援装置
【課題】車両の運転操作を行う過程で積み重ねられるドライバの心理に即した運転支援を実現することのできる運転支援装置を提供する。
【解決手段】車両の運転域における各交通情報下での操作態様を検出しつつ、それら検出された操作態様に関する情報を交通情報毎に関連付けして学習する。そして、前回の減速地点で行われた減速操作と次の減速地点に関連付けして学習されている情報とに基づいて次に実行すべき運転支援態様を決定する。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、好適に減速制御を実行する。
【解決手段】車両の制御装置は、減速対象地点における運転者の減速行動を学習する学習手段(210)と、車両が減速対象地点に接近している場合に、学習された減速条件を用いて減速制御を行うべきか否かを判定する判定手段(220)と、減速制御を行うべきと判定された場合に、学習された減速行動に応じた減速制御を行う減速制御手段(230)と、減速制御を行うべきでないと判定された場合に、運転者による減速操作及び該減速操作の終了を検出する減速操作検出手段(130)と、減速操作が終了した時点から、減速操作を引き継ぐと共に減速制御を完了させるべき減速目標地点までの減速を補完するような減速パターンを演算する演算手段(240)と、減速パターンに応じた補完減速制御を行う補完減速制御手段(250)とを備える。
(もっと読む)
運転学習システム及び運転支援システム
【課題】車両の運転者が期待する制御を行う。
【解決手段】運転学習システム(10)は、車両(1)に搭載され、車両の運転者に係る運転挙動を学習する運転学習システムである。該運転学習システムは、車両が交差点を通過中であり、且つ車両が交差点を右折又は左折することを条件に、車両が交差点を右折又は左折し始めた後に、(i)運転者が車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めた時点における車両の交差点内の位置である第1位置、及び(ii)運転者がアクセルペダルを踏下し始めた時点における車両の交差点内の位置である第2位置を記録する記録手段(109)と、記録された第2位置から記録された第1位置を差し引いた差分を計算する計算手段(109)と、計算された差分と閾値とを比較した結果に応じて、運転挙動を学習する際に記録すべき項目を変更する変更手段(109)とを備える。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
車両用制御装置
【課題】この発明は、ヨーレートセンサの値を学習補正する場合において、精度の高い学習補正を常に実施でき、学習補正の精度を高めることで、精度の高い自車線の推定が可能な車両用制御装置を提供することを目的とする。
【解決手段】この発明は、ヨーレートセンサの値を、車両の走行安定性を保つための制御に利用する第1の制御装置と、前記ヨーレートセンサの値を、車両の制御に利用する第2の制御装置とを備えた車両用制御装置において、前記ヨーレートセンサが計測した値を、学習補正した値に補正する学習手段を備え、前記学習手段により学習補正した値を用いて、前記二つの制御装置はそれぞれの制御を行い、前記学習手段は、車両の状態に応じて、前記第1の制御装置、あるいは第2の制御装置のどちらか一方を用いて学習補正を実施することを特徴とする。
(もっと読む)
液圧ブレーキユニットと液圧ブレーキユニットの制御方法とそのプログラム
【課題】リニア制御弁の制御をより正確にできる液圧ブレーキユニットを提供することを目的とする。
【解決手段】ブレーキECUにより通電制御されるリニア制御弁が開閉してホイールシリンダの液圧を制御する液圧ブレーキユニットにおいて、ブレーキECUは、リニア制御弁の通電量に対する開弁作動特性を取得する場合に、リニア制御弁と連通するパーキングブレーキの作動による開弁作動特性への影響を低減させる制御処理をする液圧ブレーキユニットとする。この制御処理は、リニア制御弁と連通するパーキングブレーキの作動有無を検知し、パーキングブレーキが作動状態であれば、開弁作動特性の取得をしない処理とできる。
(もっと読む)
1 - 10 / 37
[ Back to top ]