
国際特許分類[B60W40/06]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 周囲の環境に関するもの (507) | 道路の状態 (322)
国際特許分類[B60W40/06]に分類される特許
1 - 10 / 322
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
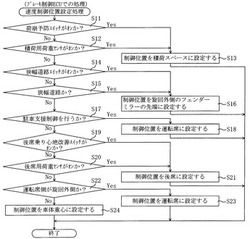
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法

【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
電動パーキングブレーキ装置
【課題】路面の勾配に応じた荷重の目標値を短時間で決定可能な電動パーキングブレーキ装置を提供する。
【解決手段】電動パーキングブレーキ装置は、パーキングブレーキと、アクチュエータと、勾配センサと、荷重センサと、制御部と、を有している。制御部は、アクチュエータ目標荷重値を決定する荷重値決定と荷重センサの出力に基づいてアクチュエータによる荷重がアクチュエータ目標荷重値まで到達するようにアクチュエータを制御する駆動制御とを行う。制御部は、荷重値決定において、勾配センサからの勾配値の時系列における変曲点を判定し、変曲点以降の勾配値の時系列と予め定められたフィルタ係数とに基づいて、勾配値の収束値を推定することにより推定勾配を算出するフィルタ処理を行い、推定勾配に基づいてアクチュエータ目標荷重値を決定する。
(もっと読む)
走行制御装置
【課題】自車走行路の制限速度を的確に推定する。
【解決手段】フロントカメラ4およびリアカメラ5による撮像画像情報を画像処理し、走行車線の幅員、走行車線の左右の区画線の線種、左側の歩道と車道外側線部間(路肩)の幅員、中央帯の幅員などを検出する。これら情報とナビゲーション装置2からの道路種別情報とから自車走行路の“道路の区分”を予測し、この“道路の区分”に対して予め規定されている設計速度を推定する(ステップS1〜S5)。さらに、ナビゲーション装置2から道路勾配および道路曲線半径情報を獲得し、自車走行路の道路勾配および道路曲線半径に対して予め規定されている設計速度を推定する(ステップS6、S7)。そして、“道路の区分”および道路勾配、道路曲線半径に基づき推定した設計速度から自車走行路の設計速度を推定し、これを自車走行路の推定制限速度とする(ステップS8)。
(もっと読む)
道路勾配推定システム、道路勾配推定装置、及びプログラム
【課題】車両の計測データを用いて、道路勾配を精度よく推定することができるようにする。
【解決手段】車載器12において、車両の速度、燃料消費量、及び位置を計測する。駆動力算出部60によって、燃料消費マップに基づいて、計測された速度及び燃料消費量の組み合わせに対応する駆動力を求め、道路勾配推定部62によって、計測された速度と求められた駆動力とに基づいて、道路勾配を推定する。情報通信部30によって、推定された道路勾配、計測された位置、及び参照した燃料消費マップの燃料消費量の信頼度を送信する。センター側サーバにおいて、車載器12より送信された道路勾配、位置、及び燃料消費量の信頼度を受信し、受信した燃料消費量の信頼度に応じて、道路勾配地図における受信した位置の道路勾配を、受信した道路勾配を用いて更新する。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】より正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】道路における停止物の中から反射体の物体単位データを抽出し、抽出した反射体の物体単位データに基づいて反射体の列を通る円を近似することにより道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。この一連の処理を所定の周期で繰り返し実行する。そして、反射体の物体単位データを抽出する際には、前回周期で抽出した反射体の物体単位データのうち、前回周期で算出した道路形状推定Rを基準とした径方向の所定範囲内に位置するものを今回周期の抽出処理で抽出した反射体の物体単位データに追加する。また、道路形状認識を行う際には、データ追加後の反射体の物体単位データに基づいて道路形状推定Rを算出し、この道路形状推定Rを用いて道路形状を認識する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両および車両用制御方法
【課題】走行路面の誤判定を抑制して、走行路面に応じた駆動力制御を実現する。
【解決手段】ECUは、バンドパスフィルタ処理を実行するステップ(S102)と、積算値算出処理を実行するステップ(S104)と、ローパスフィルタ処理を実行するステップ(S106)と、所定時間毎に今回の第2フィルタ出力値と前回の第2フィルタ出力値との差がしきい値α以上であるか否かを判定するステップ(S114)と、今回の第2フィルタ出力値と前回の第2フィルタ出力値との差がしきい値α以上である場合に(S114にてYES)、増加カウント値Ciに「1」を加算するステップ(S116)と、第2フィルタ出力値Fo2がβ以上であって、かつ、増加カウント値Ciがγ以上である場合に(S122にてYES)、駆動力の制限制御を実行するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
車両用情報処理装置
【課題】ドライバーに違和感を与えることを防止することが可能な車両用情報処理装置を提供する。
【解決手段】車両のドライバーの過去の操作の記録に基づいて車両を減速させるための情報処理を行なう運転支援装置10のECU30は、車両がカーブを走行するときは、カーブを走行したときのドライバーの過去の操作における操舵量が最大の時の車両の車速と位置とに基づいて車両を減速させるための基準となる目標車速と目標位置とを設定し、車両を減速させるための情報処理を行なう。カーブでは、操舵量が最大となる時の車速と位置とを基準とすることにより、カーブにおいて最もばらつきが少なく安定している車速と位置とを基準とでき、基準となる車速が遅過ぎるか、基準となる位置が車両から手前過ぎてドライバーに違和感を与えることを防止することができる。
(もっと読む)
1 - 10 / 322
[ Back to top ]