
国際特許分類[B62D101/00]の内容
国際特許分類[B62D101/00]に分類される特許
1 - 10 / 3,423
車両のパワーステアリング制御装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電動パワーステアリング用モータの故障診断装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
ヨー応答ゲインの評価方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
電子制御装置、および、これを用いた電動パワーステアリング装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用操舵装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
車両用操舵装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
自動車
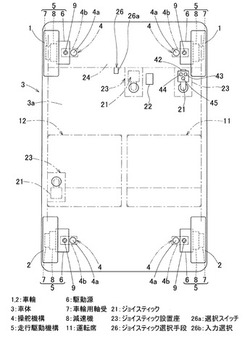
【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
車両用操舵装置

【課題】転舵輪側からタイロッドに入力する高周波振動を新規な方法で推定して操作部材に伝達することができ、操舵感が向上する車両用操舵装置を提供する。
【解決手段】ラックハウジング18に加速度センサ30が取り付けられている。FFT処理部52Aは、加速度センサ30の出力信号を、時間領域信号から周波数領域信号に変換する。逆入力振動成分抽出部52Bは、FFT処理部52Aによって得られた周波数領域信号から、周波数fが所定範囲内(fL≦f≦fH(fH>fL))にあり、かつパワー密度ρが所定範囲内(ρL≦f≦ρH(ρH>ρL))にある信号を抽出する。IFFT処理部52Cは、逆入力振動成分抽出部52Bによって抽出された周波数領域信号を時間領域信号(逆入力振動推定値)に変換する。
(もっと読む)
電動パワーステアリング装置
【課題】加速度センサをタイロッドに比べて動きの小さいラックハウジングに取り付けることができるとともに、加速度センサの出力信号からタイロッドの加速度を推定することができるようになる電動パワーステアリング装置を提供する。
【解決手段】ラックハウジングに加速度センサ30が取り付けられている。加速度センサ30はラックハウジング加速度を検出する。位相進み補償処理部52Aは、タイロッド加速度に対するラックハウジング加速度の位相遅れ分だけ、ラックハウジング加速度の位相を進めるための位相進み補償処理を行なう。ゲイン補正処理部52Bは、タイロッド加速度に対するラックハウジング加速度のゲイン減少分だけ、ラックハウジング加速度のゲインを増加させるためのゲイン補正処理を行なう。
(もっと読む)
車両姿勢制御装置
【課題】湾曲した道路を車両が走行するときの車両の操縦性の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7と、車両1の目標姿勢を決定する演算装置49とを備え、前輪制御装置6および後輪制御装置7が、車両1の姿勢を、演算装置49により決定された目標姿勢に近づける。演算装置49は、車両1が走行している湾曲した道路の曲率に係る情報、および湾曲した道路の幅方向における車両1の位置に係る情報の少なくとも一方の情報に基づいて、道路の湾曲に沿って曲がる曲線の接線に対して車両1の前後方向に延びる左右中心軸のなす角度を決定する。
(もっと読む)
1 - 10 / 3,423
[ Back to top ]