
国際特許分類[B62D113/00]の内容
国際特許分類[B62D113/00]に分類される特許
101 - 110 / 2,744
車両用操舵装置および操舵制御方法
【課題】ステアバイワイヤシステムにおいて付与する操舵反力をより適切なものとすること。
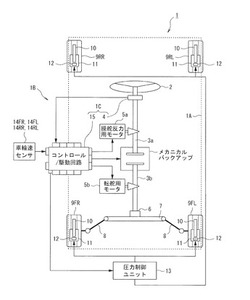
【解決手段】操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、ステアバイワイヤシステムにおける操舵反力用モータ5aの駆動制御を行う操舵反力用モータ制御手段とを有する車両用操舵装置とした。
(もっと読む)
電動パワーステアリング装置

【課題】電動モータの電気的抵抗が精度良く推定することが可能となる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置は、電動モータ20の電気的抵抗の推定値に基づいて同電動モータ20の回転速度を算出する。そして、舵角センサ54の出力が舵角一定条件を満たすとき、かつ、電動モータ20の誘起電圧が誘起電圧一定条件を満たすとき、電動モータ20の電気的抵抗の推定値を推定して更新する。
(もっと読む)
電動パワーステアリング装置
【課題】ラックシャフトがストッパに衝突したときに発生するステアリングシャフトの慣性トルクを小さくすることのできる電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置1は、ステアリングシャフト10と、ラックシャフト20と、ストッパ41と、ステアリングシャフト10にトルクを付与する電動モータ51と、電動モータ51の駆動電流を制御するための指令信号を出力する制御装置54とを備える。制御装置54は、ラックシャフト20がストッパ41に衝突したときにステアリングシャフト10に発生するトルクを慣性トルクとし、慣性トルクとは反対の方向のトルクを補償トルクとし、ステアリングシャフト10に補償トルクを付与する電動モータ51の駆動電流を補償電流とし、補償電流を電動モータ51に供給するための指令信号を補償指令信号として、慣性トルクが発生しているときに補償指令信号を出力する。
(もっと読む)
車両用操舵装置、操舵力推定装置、操舵制御方法および操舵力推定方法
【課題】車両用操舵装置において、操舵トルクあるいはラック軸力をより高精度に推定できるようにする。
【解決手段】車速を検出する車速検出手段14と、ステアリング軸3に入力した操舵操作における操舵角を検出する操舵角検出手段4と、ステアリング軸3に入力した操舵操作に対し、操舵補助力の付与あるいは操向輪9FR、9FLの操舵角制御を行う電動モータ5と、ステアリング軸3の回転を操向輪に伝達するステアリングラック部材7と、操向輪9FR、9FLの操舵において発生する路面と操向輪9FR、9FLとの摩擦エネルギを算出する摩擦エネルギ算出手段と、摩擦エネルギと操舵角とに基づいて操舵トルクあるいはステアリングラック部材7のラック軸力を推定する操舵力推定手段と、操舵力推定手段が推定した操舵トルクあるいはラック軸力に応じて、電動モータ5の駆動制御を行うモータ制御手段とを備える車両用操舵装置とした。
(もっと読む)
電動パワーステアリング装置
【課題】 ブラシ付モータ20のブラシの位置ずれを検出する。
【解決手段】 位置ずれ検出部80は、モータ実電流Imとモータ端子間電圧Vmと回転角速度ωとに基づいて、モータ20の逆起電圧定数Keを計算し、そのデータ(Ke,Im)をサンプリングする(S31〜S34)。そして、電流方向別にモータ実電流Imに対する逆起電圧定数Keの特性を表す近似式を計算し(S35)、プラス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A1と、マイナス方向のモータ実電流Imに対する逆起電圧定数Keの近似式の1次係数A2のとの偏差ΔAが判定基準値Arefを超える場合に、ブラシの位置ずれが生じていると判定する(S39)。
(もっと読む)
ステアリング制御装置
【課題】車両の走行安定性を向上させることが可能なステアリング制御装置の提供。
【解決手段】位相検出部18は、操舵輪側で発生する実舵角θbがステアリングホイール側で発生する操舵角θaに対して一方の回転方向へ先行して変化する進み位相状態であるか否かを判定し、実舵角θbが進み位相状態である場合、モータベクトル制御部17は、上記一方の回転方向に対して反対方向へ向かう制動トルクを発生させる指令信号をモータ3へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置において、モータに電流を流す通電路に設けた開閉リレーが溶着等により閉故障した場合、安全に操舵アシストを継続して、運転者の感じる不便を軽減する。
【解決手段】リレー故障検出部61により開閉リレー48の閉故障が検出されると、制御態様変更部80は、目標電流演算部71、電流指令値演算部72、PWM制御部73に対して、回路故障抑制操舵アシスト制御の実行を指令する。回路故障抑制操舵アシスト制御時においては、モータ駆動回路40の故障が抑制されるように、モータ20の上限電流Imax、あるいは、上限電圧Vmax、あるいは、上限電力Pmax、あるいは、目標電流I*、あるいは、電圧指令値V*が低減される。
(もっと読む)
走行支援装置及び方法
【課題】運転者の意図によって1次操舵後に2次操舵を行う場合に、不要な支援を低減する技術を提供する。
【解決手段】車輌の走行可能な走路からの車輌逸脱時に、車輌を前記走路内で走行させるように警告又は補助の支援を行う走行支援装置であって、1次操舵量が前記支援を停止するか否かの閾値となる第1所定量を超えたことにより、前記支援を停止しているときに、さらに2次操舵量が前記支援の停止を延長するか否かの閾値となる第2所定量を超える場合には、前記支援の停止を延長する。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】車線の幅変化等の状況変化があっても、車両に目標走行ラインを走行させるための適切な支援ができる車両用操舵装置を提供する。
【解決手段】操舵補助力をモータ6によって発生させる操舵補助モード、及び、走行車線を自動的に維持するための反力トルクをモータ6によって発生させる車線維持支援モードで使用可能な車両用操舵装置100であって、道路の1車線の幅及び当該幅内の自車両の位置を検知する検知装置15と、車線維持支援モードにおいて、前記幅内の目標走行ラインから前記幅の最寄りの一方の端を車両が逸脱しない位置までの距離に対して所要のトルク値が得られる反力トルクの特性を、目標走行ラインを中心線として設定し、設定した特性に基づく反力トルクを操舵機構に付与する制御装置12とを備えたものである。
(もっと読む)
101 - 110 / 2,744
[ Back to top ]