
国際特許分類[B62D113/00]の内容
国際特許分類[B62D113/00]に分類される特許
81 - 90 / 2,744
車体傾動制御装置、車体傾動制御方法
【課題】旋回走行時に車体を旋回内側に傾動させる制御の精度を向上させる。
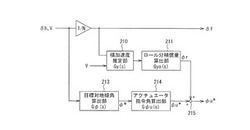
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を算出し、旋回走行時における旋回外側へのロール運動分に相当する補償量φrを算出する。そして、目標対地傾斜角φ*及び補償量φrに応じて、駆動モータ3を駆動制御する。また、一次の応答遅れ特性をもつ車両モデル(Gy0(s))に従い、横加速度に応じて補償量φrを算出すると共に、車両モデル(Gy0(s))の時定数を、ロール等価粘性Cφとロール剛性Kφとの比に応じて決定する。また、車両モデル(Gy(s))に従い、運転者のステアリング操作及び車速に応じて、車体の横加速度を推定し、推定した横加速度に応じて補償量φrを算出する。
(もっと読む)
電動パワーステアリング装置

【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
舵角比可変操舵装置
【課題】応答性が良くて剛性感のある良好な操舵フィーリングを得ることができる舵角比可変操舵装置を提供する。
【解決手段】舵角比可変機構15は、操舵部材とトーションバーを介して連結された入力軸と、転舵機構に連結された出力軸を接続する。操舵部材の操作に基づく第1舵角にVGRモータ21の駆動に基づく第2舵角θtmを上乗せすることにより、舵角比を可変する。VGR制御部16が、操舵角θs や車速Vに基づいて演算された基礎成分θtmk * に、ねじれ角センサにより検出された、トーションバーのねじれ角δに基づいて演算された補償成分θtmh * を重畳することにより、第2舵角の制御目標値δtm* を演算する。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、ヨーレートセンサを含む複数の変量検出部の検出値の絶対値が所定の範囲内にあり、かつ、ヨーレートセンサの検出値の今回値の絶対値が前回値の絶対値より小さいということを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
障害物検出装置及び車両制御装置
【課題】障害物の検出精度を向上させることが可能な障害物検出装置を提供する。
【解決手段】障害物検出装置100は、障害物6を検出する検出領域Cを、車両1の進行方向A1に設定する検出領域設定部53と、検出領域C内に位置する障害物6を検出する情報取得装置3及び判断部55と、車両1における操舵操作の操舵方向aを検出する操舵方向検出装置4と、を備え、検出領域設定部53は、検出領域Cにおいて、操舵方向aに対して反対方向に位置する反対部分C2を、車幅方向外側に向って拡大する。
(もっと読む)
操舵装置及び操舵制御装置
【課題】操舵フィーリングを向上させることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ操舵操作が可能である操舵部材5と、操舵部材5に対する操舵操作を補助するアクチュエータ9と、アクチュエータ9を制御し、操舵部材5の中立位置側からの切り込み操作に対応した当該操舵部材5の中立位置側への切り戻し操作を補助する戻し操作補助制御を実行可能であり、切り込み操作の際の操舵部材5の操舵量に応じて、当該戻し操作補助制御を実行する際の切り戻し操作時間を決定する操舵制御装置11とを備えることを特徴とするので、操舵フィーリングを向上させることができる。
(もっと読む)
電動パワーステアリング装置
【課題】ステアリングホイールの中点を正確に設定することで、その中点からの操舵量に応じた制御の適正化を図ることができる電動パワーステアリング装置を提供する。
【解決手段】変量検出部は、複数種類の変量をそれぞれ検出する複数種類の変量検出手段を備え、制御部は、それぞれの検出値の絶対値が所定の範囲内にあり、かつ、それぞれの検出値の今回値の絶対値が前回値の絶対値より小さいことを学習条件とする。そして、上記学習条件を満たすときに、その時点の検出操舵量を設定中点とする。
(もっと読む)
パワーステアリング装置
【課題】パワーステアリング装置に関し、運転者の操舵感を効果的に維持する。
【解決手段】ステアリングシャフト22から伝達される回転トルクにアシストトルクを付与可能なモータ13と、操舵状態を検出する操舵角センサ11、車速センサ12と、可変容量形ポンプ30から供給される作動油の流量を制御する作動油流量制御部と、作動油流量制御部による制御量に基づいて作動油の流量を推定する作動油流量推定部と、推定された作動油流量が下限閾値以下の場合にアシスト力を演算する操舵アシスト力演算部と、演算された操舵アシスト力に基づいてモータ13の駆動を制御するモータ駆動制御部とを備えた。
(もっと読む)
ステアリング装置、産業車両およびプログラム
【課題】産業車両の発進時に運転者が意図しない方向に進んでしまうのを防止する。
【解決手段】フォークリフト1のステアリング装置5では、フォークリフト1に運転者が存在しない(S120:NO)という条件が成立した場合に、操舵輪53の舵角が基準となる基準角まで戻る復帰制御が行われる(S150〜S230)。これにより、上記条件の成立により復帰制御が行われることを知る運転者にとっては、フォークリフト1の進行方向が復帰制御により基準角に応じた方向になっていることを認識できるため、フォークリフト1の発進時に運転者が意図しない方向に進んでしまうようなことがなくなる。
(もっと読む)
81 - 90 / 2,744
[ Back to top ]