
国際特許分類[B62D113/00]の内容
国際特許分類[B62D113/00]に分類される特許
71 - 80 / 2,744
モータ制御装置及び電動パワーステアリング装置
【課題】演算用モータ抵抗値の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に流れる電流検出値Ieを検出する電流値検出部31と、モータ12に印加される端子間電圧Vtを取得する入力電圧設定部37と、電流検出値Ie及び端子間電圧Vtに対してフィルタ処理を施すフィルタ部40と、モータ12で発生する誘起電圧Eを算出する誘起電圧推定部43と、デューティ比微分値ΔDを算出する変化量算出部41と、フィルタ後電圧値Vtfをフィルタ後電流値Iefで除算してモータ12の今回の抵抗算出値Re(n)を求める抵抗算出部72と、誘起電圧Eが基準値以下であると共に、デューティ比微分値ΔDが基準変化量以下である場合に、今回の抵抗算出値Re(n)に基づき今回の演算用モータ抵抗値R(n)を設定する抵抗設定部73と、を備える。
(もっと読む)
電動パワーステアリング制御装置

【課題】路面反力トルクを正しく推定することができる電動パワーステアリング装置を提供する。
【解決手段】ドライバがハンドルに入力するトルクであるハンドルトルク、モータに生じるトルクであるモータトルク、路面反力トルクに応じてそれぞれ検出値が変化する3つのセンサ(トルクセンサ4、回転角速度センサ13、モータ電流センサ14)と、これら3つのセンサの検出値が入力され、これらの検出値に基づいて路面反力トルク推定値Tl_estを出力する路面反力推定器101とを備える。この路面反力推定器101として、推定する値の入力に対しては入力値と略等しい出力値を出力する応答性を備えるとともに、推定する値以外の入力に対しては略ゼロを出力する分離性を備える推定器であって、推定する値が路面反力トルクとされた推定器を用いる。
(もっと読む)
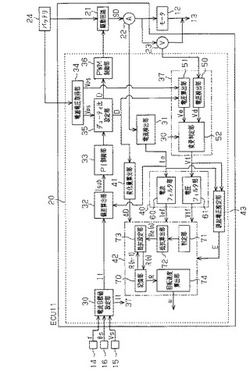
モータ制御装置及び電動パワーステアリング装置
【課題】ブラシ付きのモータに対する電流の目標値の大きさに関係なく該モータで発生する誘起電圧を算出できると共に、該誘起電圧の算出精度を向上させることができるモータ制御装置及び電動パワーステアリング装置を提供する。
【解決手段】モータ12を制御するECU11は、モータ12に対する電流目標値Itを設定する電流目標値設定部30と、電圧センサ23からの検出信号に基づき電圧検出値Vdを検出する電圧検出部50と、バッテリ24の電源電圧Vpsに基づき電圧推定値Veを算出する電圧算出部51と、電流目標値Itが「0(零)」以外の値に設定される場合には電圧推定値Veに基づいた端子間電圧Vtを用いてモータ12で発生する誘起電圧Eを算出する一方、電流目標値Itが「0(零)」に設定される場合には電圧検出値Vdに基づいた端子間電圧Vtを用いて誘起電圧Eを算出する誘起電圧オブザーバ38と、を備えている。
(もっと読む)
冗長機能付きステアバイワイヤ式操舵装置の制御装置
【課題】 転舵用のメインモータの失陥および制御装置の故障に対する冗長性確保のための多重化と、平常時は多重化部分を利用した高機能化を両立したステアバイワイヤ式操舵装置の制御装置を提供する。
【解決手段】 メインモータを切り離しサブモータの回転を伝えて転舵可能なフェールセーフモードとする切替機構17を有する。第1の制御装置101は、反力アクチュエータ4とサブモータ7を制御する。第2の制御装置201は、メインモータ6を駆動する。第1の制御装置101は、異常時切替指令部106を有し、メインモータ6が失陥であるとの診断結果を受けたとき、および相互故障診断部103で第2の制御装置201が故障であると診断したときに、切替機構17をフェールセーフモードとする。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両用制御装置
【課題】この発明は、車輪速から操舵角を推定することができ、舵角検出手段を搭載していない車両でも操舵角を推定して、操舵角情報を必要とする全ての制御を実行することが可能な車両用制御装置を実現することを目的とする。
【解決手段】この発明は、左車輪速を検出する左車輪速検出手段と、右車輪速を検出する右車輪速検出手段と、左車輪速と右車輪速とから左右輪回転差を算出する左右輪差算出手段と、左車輪速と右車輪速とから車速を算出する車速算出手段と、左右輪回転差と車速とに基づいて推定操舵角を演算する推定操舵角演算手段と、推定操舵角を更新するかどうかを判定する推定操舵角更新判定手段とを備えた推定操舵角計算手段を設けることを特徴とする。
(もっと読む)
電動パワーステアリング装置
【課題】モータ回転角センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ回転角センサ(24)の異常が検出された場合には、モータ回転角にかえて、ステアリングシャフト(3)の回転角で、モータ(12)を駆動制御する。更に、前記ステアリングシャフト(3)の回転角は、モータ(12)の回転角に対して、トーションバー(17)の捻れ分だけ位相が進んでいるので、トーションバー(17)の捻れ分だけステアリングシャフト(3)の回転角の位相を遅らせる補正を行なう。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 トー角制御用モータの小型化を図り消費電力の増加を抑え、また車両の停止時に、トー角を制御するとき運転者に違和感を与えないステアバイワイヤ式操舵装置を提供する。
【解決手段】 ステアリング制御手段8aは、車両の停車時に、トー角を変える指令信号を出力する場合にトー角を変える回転分割軸6B側の操舵輪3を、この操舵輪3が接地する地面に対して方向が変化しないように、トー角調整用モータ13と転舵用モータ11とを協調して制御する協調制御部8adを有する。
(もっと読む)
車両の自動走行制御装置
【課題】車両の自動走行制御装置に関し、動特性が変動した場合においても、目標走行ラインを安定して自動走行させる。
【解決手段】道路情報を検出するカメラ11と、目標走行ラインを設定する目標走行ライン設定部22と、目標走行ラインに対する車両の横方向相対位置を検出する相対位置検出部11,23と、車両重量を算出する車両重量演算部14,21と、車両を目標走行ラインに沿って走行させるための目標操舵角を算出する目標操舵角演算部25と、目標操舵角に基づいて自動操舵電流を算出する自動操舵電流演算部26と、自動操舵電流に応じてステアリング2を目標操舵角に回動させるアクュエータ15とを備えた。
(もっと読む)
車体傾動制御装置、車体傾動制御方法
【課題】車体を旋回内側に傾動させるときの旋回性能を改善することである。
【解決手段】旋回走行時に車体をロール方向に沿って旋回内側に傾斜させる目標対地傾斜角φ*を設定し、設定した目標対地傾斜角φ*に応じて、駆動モータ3を駆動制御する。そして、車体の目標ヨーレートγ*を設定し、目標ヨーレートγ*及び車体のロール方向に沿った旋回内側への傾斜角に応じて、車体のヨーレートを制御する。具体的には、操舵角及び車速に応じて、車体の目標ヨーレートγ*を設定し、車体をロール方向に沿って旋回内側に傾斜させるときのキャンバスラストに起因したヨー運動分に相当するキャンバスラスト分補償量δcを算出する。そして、目標ヨーレートγ*及びキャンバスラスト分補償量δcに応じて、車体のヨーレートを制御する。
(もっと読む)
71 - 80 / 2,744
[ Back to top ]