
国際特許分類[B62D113/00]の内容
国際特許分類[B62D113/00]に分類される特許
41 - 50 / 2,744
電動パワーステアリング装置
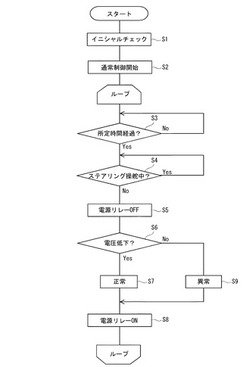
【課題】ステアリングホイールの操舵をアシストする通常制御時に、電源リレーのショート故障を診断することの可能な電動パワーステアリング装置を提供する。
【解決手段】電源からインバータ回路を経由してモータに電力を供給する配線に設けられた電源リレーは、異常時に電源からインバータ回路への通電を遮断する。マイコンは、ステアリングホイールの操舵をアシストする通常制御時に、ステアリングホイールが操舵されていないとき(S4:NO)、電源リレーのショート故障を診断する。EPSは、ステアリングホイールの操舵がされていない時に電源リレーにより通電を遮断することで(S5)、ステアリングホイールの操舵のアシストに影響を与えることなく、電源リレーのショート故障を診断することができる。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置

【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁制御によって軽快な操舵フィーリングを保持しつつ、弱め界磁制御が有効ではなくなって無駄な発熱が発生する事象を、モータの駆動状況に応じて回避する電動パワーステアリング装置を提供する。
【解決手段】モータの駆動状況に対応するトルク電流であるq軸電流IqがIq=Iq´に設定されたとき、モータ回転数が増加しないで発熱のみが増加するドットを付けた領域135内に電流ベクトルiを設定しないで、ハッチングで示す使用領域134内で、弱め界磁電流であるd軸電流Idが使用領域134の上限値Idlimとなる電流ベクトルkに設定する。
(もっと読む)
パワーステアリング装置
【課題】省電力化が図れるとともに、操舵補助力が必要な場合に電動モータの駆動が停止されたり、電動モータの回転速度が低速に制御されたりするのを回避できるパワーステアリング装置を提供する。
【解決手段】電動モータ24が通常モードで駆動制御されている場合において、車速Vsが閾値A1以下でかつ操舵角速度Vhが閾値B1以下でかつモータ電流Imが閾値C1以下の状態が閾値D1で規定される第1の所定時間以上継続したときには、制御モードが省電力モードに切り換えられる。これにより、電動モータ24の目標回転速度Vp*が第1の目標回転速度Vp1*から第2の目標回転速度Vp2*に切り換えられる。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
41 - 50 / 2,744
[ Back to top ]