
国際特許分類[B62D113/00]の内容
国際特許分類[B62D113/00]に分類される特許
51 - 60 / 2,744
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
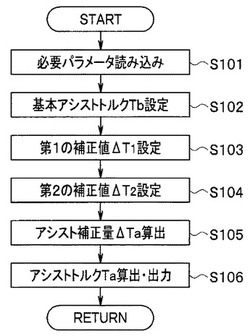
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
車両のパワーステアリング制御装置

【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
操舵支援装置
【課題】ドライバの運転意思に応じて制御方法を適切に変更する操舵支援装置を提供する。
【解決手段】自車両が走行車線に沿って走行するように操舵機構に操舵力を付与する操舵支援装置を、環境認識手段と、環境認識手段を用いて目標走行位置を設定する目標走行位置設定手段と、自車両の横位置を認識する自車横位置認識手段と、目標走行位置と横位置との偏差に基づいて目標操舵力を設定する目標操舵力設定手段と、目標操舵力に基づいて操舵機構に操舵力を付与する操舵制御手段と、ドライバの運転意思を判定する運転意思判定手段とを備え、目標操舵力設定手段は、偏差の増加に応じて増加するよう設定される第1の目標操舵力と、偏差が所定値以上の時のみ所定の値に設定される第2の目標操舵力とを有し、操舵制御手段は、ドライバの運転意思が高い状態と判定されたときは前記第1の目標操舵力に基づいて操舵力を付与するとともに、運転意思が低下状態と判定されたときは第2の目標操舵力に基づいて操舵力を付与する構成とする。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車両操舵装置の制御装置
【課題】車両の走行経路と目標経路とのずれを小さくすることのできる車両操舵装置の制御装置を提供する。
【解決手段】左転舵輪20は、中心点Pを幅方向に通る中心軸Hj周りに、ドライブシャフト64の回転に伴って回転可能にナックル62に取り付けられている。左転舵輪20の中心点Pを径方向に通る軸Tjを、左転舵輪20の中心点Pを幅方向に通る中心軸Hj周りに回転させたときにできる回転面から、衝撃吸収機構65の中心軸Kjが、ドライブシャフト64側に傾斜角θkだけ傾斜するようにナックル62を取り付ける。この中心軸Kj周りの左転舵輪20の回転角度を転舵要素角θtとして、この左転舵輪20の向きの制御に用いる。右転舵輪についても同様である。
(もっと読む)
後輪操舵車両
【課題】後輪トー角可変制御装置を備えた車両において、後輪を操舵しても操舵フィーリングを悪化させないパワーステアリング装着車両を提供する。
【解決手段】後輪操舵式の自動車1において、左右の前輪4L,4Rを転舵するステアリングホイール11と、ステアリングホイール11の作動に応じて左右の前輪の転舵をアシストするEPSトルクを付与する電動パワーステアリング装置16と、左右の後輪6R,6Lに対して設けられた左右の伸縮アクチュエータ21L,21Rを個別に駆動制御することにより、左右の後輪6のトー角を前輪4の操舵方向と同相または逆相あるいはトーインまたはトーアウトに変化させる後輪トー角可変制御装置20とを備え、電動パワーステアリング装置16は、左右の後輪6のトー角に応じてEPSトルクを増減させるように構成する。
(もっと読む)
車両姿勢制御装置
【課題】タイヤのグリップ状態およびスリップ状態の双方において、車両仕様の変更による影響を受けることなく、目標方向に対する車両の進行方向のずれを小さくすることのできる車両姿勢制御装置を提供する
【解決手段】ヨーレートセンサの出力を「実ヨーレートγ」とし、車両1の左右中心軸C上に存在する任意の基準点において、進行方向DFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「車体すべり角β」とし、目標方向BFが車両1の左右中心軸Cのうち基準点よりも前方の部分に対してなす角を「目標すべり角β*」とし、目標すべり角β*と車体すべり角βとの差(β*−β)を「角度差Δβ」とする。所定の目標方向BFに対する車両1の進行方向DFの角度を制御するために、車両姿勢制御装置は、角度差Δβの符号と実ヨーレートγの符号との関係に応じて車両1の前輪31,32および後輪33,34の少なくとも一方を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁電流指令値の急変による異音や振動の発生が許容範囲となる立ち上がり、立下りが的確に設定できる電動パワーステアリング装置を提供する。
【解決手段】時点t1での基準値0から弱め界磁電流指令値Id*に到達するまでの立ち上がり区間での時間微分値を、時点t2での弱め界磁電流指令値Id*から基準値0に到達するまでの立ち下がり区間での時間微分値に比較して大きな値に設定することで、時点t1における立ち上がり区間では、トルク変動を低減して異音や振動の発生を抑制しながら高速時に急に操舵された場合等における弱め界磁制御の効果の発生が間に合うようになり、時点t2における立ち下がり区間では、時間微分値を小さな値に設定しているので、より一層トルク変動を低減して異音や振動の発生をより抑制することができる。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
51 - 60 / 2,744
[ Back to top ]