
国際特許分類[B62D55/265]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 無限軌道車 (1,396) | 無限軌道帯;それの部品 (1,139) | 軌道帯 (461) | 接地用部品または部材 (38) | 磁気または空気粘着部を有するもの (10)
国際特許分類[B62D55/265]に分類される特許
1 - 10 / 10
撮影装置
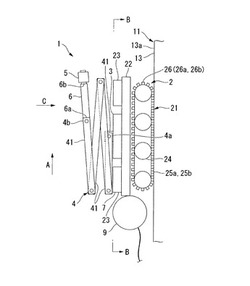
【課題】人が容易に立ち入ることができない場所にある点検対象物の撮影を、その場所へ人が立ち入らずに容易に実施することができる撮影装置を提供する。
【解決手段】磁力を有するクローラ21が設けられて遠隔操作部の操作によりタワー部13の表面(磁性体の表面)13aを走行可能な走行部3と、走行部3に接続されて遠隔操作部の操作によりタワー部13の表面13aに直交する回転軸を中心に回転可能なターンテーブル3と、基端部4aがターンテーブル3に接続されて遠隔操作により先端部4bがターンテーブル3から所望の位置へ移動可能なアーム部4と、アーム部4の先端部4bに接続されて遠隔操作部の操作により対象物を撮影可能な撮影部5と、遠隔操作部の操作により撮影部5と対象物との距離および角度を調整可能な位置調整部6と、を備える。
(もっと読む)
壁走行装置

【課題】 吸着力を確保し、地上のポンプなどとの間のホースを必要としない走行装置を提供する。
【手段】 壁面走行装置は、ポンプモータ36aによって吸着パッドを吸着する。その際、CPU72aは、ポンプの負荷電流を監視する。負荷電流が所定値を超えていれば、吸着が成功したと判断し、そうでなければ吸着が不十分であると判断する。所定時間が経過すると、再度、上記の吸着処理を繰り返す。
(もっと読む)
クローラ走行装置の吸着姿勢制御機構
【課題】
クロータ式の壁面吸着走行ロボットにおいては、無端回転帯に設けられた吸着パッドの回転側シール壁が回転輪での接面吸着時に内側に巻き込まれ、吸着力が確保できない、シール材の耐久性が低いとの課題があった。また、装置が大型化するとの課題もあった。
【解決手段】
走行装置の回転輪を3つの回転輪に役割分割し、回転輪の調整により接面姿勢の調整を可能とした。また、接面姿勢矯正機構を設け吸着パッドを平行に接面させる構造を設けた。
(もっと読む)
吸着走行装置
【課題】 吸着走行装置の吸着パッドが、被吸着面側に方向転換する過程において被吸着面に接触することが無く、正対してからは確実に被吸着面に接触するとともに、真空ポンプの作用によって十分な吸着力を発揮することができるようにすることである。
【解決手段】
装置本体には、一対の無端状の運動伝達要素5,6間に複数の支持板11をかけ渡してクローラ機構を構成する一方、各支持板11には、当該支持板の板面に対して直角方向に移動可能な吸着パッド18と、上記吸着パッドを移動するための電動アクチュエータMと、吸着パッド内を吸引する電動真空ポンプPとを備え、上記支持板11には、上記電動真空ポンプに接続したポンプ用接点25と電動アクチュエータに接続したアクチュエータ用接点30とを設け、ポンプ用接点に接続する電極29及びアクチュエータ用接点30に接続する電極31を、上記接点の移動軌跡上に設けた。
(もっと読む)
クローラ型走行装置
【課題】重量が大きくなっても柱状物の外側面に沿った移動が可能なクローラ型走行装置を提供する。
【解決手段】RC柱1の外側面に沿って移動する昇降装置2である。そして、無限軌道となるように環状に形成される履帯32と、履帯を周回させる駆動手段31と、履帯にRC柱の外側面に当接可能な向きで取り付けられる複数の吸着手段33,・・・とを有するとともに、RC柱を挟んで配置される一対のクローラ部3,3と、クローラ部をRC柱に所定の力以上で押し付ける力を付与するとともに一対のクローラ部間を連結する連結部4と、RC柱を囲繞するレール部51を有するとともに一対のクローラ部に支持される架台部5とを備えている。
(もっと読む)
吸着走行装置
【課題】 装置本体の壁面に対する吸着力を安定的に保つことができる吸着走行装置を提供することである。
【解決手段】 装置本体1に設けた一対のメインスプロケット2,4間に無端状の運動伝達要素3,5を掛け渡してクローラ機構を構成し、運動伝達要素3,5に取り付けた複数の吸着パッドP内を真空に維持して装置本体1を被吸着面Sに吸着させる吸着走行装置において、被吸着面Sに対向する側に沿って走行方向に連続するとともに吸着パッドPの吸着力を受ける受止め手段23を装置本体1に設け、上記各吸着パッドPのそれぞれには上記受止め手段に沿って移動する吸着力伝達手段25bを設け、被吸着面Sに正対した複数の吸着パッドPの吸着力伝達手段25bを介して上記受止め手段23に吸着パッドの吸着力を作用させるとともに、この受止め手段23に作用した吸着力で、装置本体1を被吸着面Sに吸着させる構成にした。
(もっと読む)
吸着走行装置
【課題】 装置全体の構造が簡単で、しかも、真空切り換えのタイミングがずれたりしない吸着走行装置を提供することである。
【解決手段】 装置本体1に設けた一対のメインスプロケット2,4間に運動伝達要素3,5を掛け渡してクローラ機構を構成するとともに、上記運動伝達要素3,5に複数の吸着パッドPを連結し、吸着パッドPが被吸着面Sに接触した状態で上記吸着パッド内を真空源に連通させ、当該吸着パッド内を真空に維持することによって、装置本体が被吸着面に対して吸着状態を維持しながら走行する吸着走行装置において、上記吸着パッドPのそれぞれには開閉弁機構V1を個別に設けるとともに、この開閉弁機構V1は、吸着パッドPが被吸着面Sに接触したときに作用する力によって開弁して当該吸着パッドPを真空源に連通させる一方、被吸着面Sに対して非接触状態にあるとき閉弁して当該吸着パッドPと真空源との連通を遮断する構成にした。
(もっと読む)
空気浮上移送システム及びこれを用いた空気浮上移送装置
本発明は空気浮上移送システム及びこれを用いた空気浮上移送装置に係り、軌道を形成しながら移動される無限軌道部と、前記無限軌道部の内周面に配設されて空気反発力により前記無限軌道部の内周面において浮上される多数のエアーベアリングと、前記多数のエアーベアリングと結合されて移送物が積載される積載部と、を備え、前記キャタピラーの移動により前記積載部が浮上されて一体に移動されることを特徴とする。  (もっと読む)
(もっと読む)
走行安定化装置
【課題】 より単純な構造で、壁面などの被吸着面に対して確実に吸着力を発揮し、しかも、エネルギーロスも少なく、安価な走行安定化装置を提供すること。
【解決手段】 複数の吸着パッド19を無端状の走行体29,30に設けてクローラ機構を構成し、吸着パッド19には、吸着パッド内を真空源に接続するための接続口37を設け、吸着パッド内を真空に維持したときに、装置本体Zを被吸着面に吸着させる走行安定化装置において、吸着パッド19には、接続口37に接続し、上記吸着パッドを被吸着面に接触させたときに開弁する開閉弁機構V1を設けるとともに、上記各吸着パッドの複数の接続口を一連に連通させる可撓性を有する真空連通パイプVPを備えるとともに、この真空連通パイプと真空発生源とを相対回転可能に接続する回転接続手段55を設け、真空連通パイプVPを、各接続口37との相対関係を維持して走行可能にした。
(もっと読む)
軽量可動ロボット用の多用途無限軌道
軽量ロボット車両用の多用途無限軌道システム(10)が開示される。多用途無限軌道システムは、軽量ロボット車両の複数の軌道支持部(12)の周りに装着されるように構成された可撓性軌道(16)を含む。少なくとも2つの異なる型のトラクションパッドを含む複数のトラクションパッド(18)が、無限軌道に沿って配置される。異なる型のトラクションパッド(20、22)が、異なるトラクション特性を有する地表面に対してトラクションをもたらすように設計された、地面に係合する異なる輪郭を提供する。任意で、トラクションパッドは取り外し可能であることができ、多用途無限軌道を再構成できるようになる。多用途無限軌道を構成する方法も開示される。  (もっと読む)
(もっと読む)
1 - 10 / 10
[ Back to top ]