
国際特許分類[B62D9/00]の内容
国際特許分類[B62D9/00]の下位に属する分類
曲線路上で車体を内方に傾斜されるための手段と結合されたもの (9)
曲線路上で車両の車輪を傾斜させるための手段と結合されたもの
国際特許分類[B62D9/00]に分類される特許
1 - 10 / 44
自動追尾式自走台車
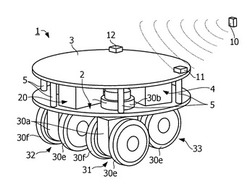
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
小型車両

【課題】コミュータ等の小型車両において、安全にその場回転や横移動ができるようにすることを課題とする。
【解決手段】全車輪13、14に転舵アクチュエータ17が設けられ、その内の駆動車輪14にはインホイールモータ15設けられ、車体12に搭載されたコントローラ16のプログラムに従い前記転舵アクチュエータ17及びインホイールモータ15が制御される小型車両において、前記車体12に車体傾斜センサーが設けられ、前記プログラムにその場回転又は横移動の制御手段を備え、前記いずれの制御手段を実行するプログラムにおいても、前記車体傾斜センサーによって得られる傾斜角度情報に基づき運転の可否を判断する判断手段が設けられた構成とした。
(もっと読む)
全方向移動ロボット
【課題】駆動力を効率的に球状車輪に伝達することができる全方向移動ロボットを提供する。
【解決手段】1又は2以上の球状車輪2と、前記球状車輪2の中心で交差するピッチ軸、ロール軸、及びヨー軸周りに回転自在に前記球状車輪2を支持し、直列に連結されたピッチリンク10、ロールリンク11、及びヨーリンク12と、前記各リンクを回転駆動させるアクチュエータ5と、前記アクチュエータ5を動作制御する制御部6と、前記ヨーリンク12に固定された搭乗部4と、前記搭乗部4の姿勢を検出する変化量検出センサ7とを備えることを特徴とする。
(もっと読む)
車輪式運搬車両
【課題】路面の凹凸に沿って、しかも部分的に滑ることなく走行できるようにする。
【解決手段】車体の前部に運転室3とエンジン室4を搭載し、車体のこれらの後側に、前輪軸枠9の両端に車輪装置10a,10bを備えた前輪装置5と、後輪軸枠23の両端に車輪装置24a,24bを備えた後輪装置6を設けた車輪式運搬車両において、前輪装置の前輪軸枠を車体に対して左右方向に揺動自在に支持し、また後輪装置の後輪軸枠を車体に対して水平方向に旋回駆動可能に設け、また上記前輪装置と後輪装置のそれぞれの両端に備えられる各車輪装置を、2個の車輪を前後に離隔して有するタンデム構成にすると共に前後方向に揺動自在にし、この各車輪装置を個々の油圧モータ15にて駆動するようにすると共に、この各油圧モータを上記エンジン7にて駆動されるようにして上記油圧モータの数以上設けた個々の油圧ポンプ26a,26b,26c,26dにて駆動するようにした
(もっと読む)
車両の操舵装置
【課題】転舵される一対の従動輪に回転速度差を生じさせて車両を操舵することができる車両の操舵装置を提供すること。
【解決手段】三輪自転車11は、ペダル17の踏み込みにより駆動される後輪13、及び従動輪としての左前輪22L及び右前輪22Rを有する。この三輪自転車11の操舵装置は、左前輪22Lと右前輪22Rに回転速度差を生じさせて回転させる無段変速装置30と、この無段変速装置30の変速比を調節する調節手段Rを備える。
(もっと読む)
乗用車両
【課題】狭い場所で車両を回転させることができる乗用車両を提供する。
【解決手段】左右方向に並設されてフレーム部材11に配設された対の後輪33と、該後輪33に対し前側に配置されてフレーム部材11に設けられた前輪25とを備え、電気的駆動手段により走行駆動される乗用車両において、前輪25を路面から持ち上げる従動輪持ち上げ手段40を備え、両後輪33の回転速度を個別に変化させる。
(もっと読む)
乗用車両
【課題】車両の走行中に操舵した際の車両姿勢をより安定化することができる乗用車両を提供する。
【解決手段】フレーム部材11に対して回動自在に連結され左右方向に並設された対の支持部材31と、該両支持部材31に配設された対の後輪33とを備え、電気的駆動手段により走行駆動される乗用車両において、フレーム部材11に対する両支持部材31の回動角度をそれぞれ変化させて両後輪33の進行方向における位置を変化させる対の車輪位置駆動手段30とを備え、ハンドル12の操舵時に両車輪位置駆動手段30の片側のみを駆動して、両後輪33の進行方向における位置を互いに異なるように変化させる。
(もっと読む)
スリップリング、差動式キャスタ、及び電動車いす
【課題】小型化、及び部品点数の削減を図り、低コストなスリップリング、差動式キャスタ、及び電動車いすを提供する。
【解決手段】縮径部53bに外嵌固定した回転端子71,78と、縮径部53bの周方向に沿って配置し、縮径部53bの径方向の外側から回転端子71,78の外周面に摺接可能な摺接端子72,79と、を備え、摺接端子72,79に、バッテリに電気的接続する供給線57a,57bを設け、供給線57a,57bを、摺接端子72,79から径方向の外側に向けて引き出すことを特徴とする。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
壁面走行ロボット
【課題】各種大型構造物の外壁や内壁に吸着して各種作業に従事する壁面走行ロボットの悪環境における走行性を改善し、壁面走行ロボット自体の軽量化及び揚力付与等によって壁面への吸着を安定化させた壁面走行ロボットを提供する。
【解決手段】三角形枠の頂点に駆動輪7を有するシャーシ1と、作業対象の壁面Wに対して平行な吸着板3の周辺に、該壁面に接する長さのブラシ毛12を密に配列させてなるブラシスカート4を備えた吸着部2と、吸着板の中央に開口するベルマウス6を吸着用ダクトファン5に接続した吸着機構と、上記駆動輪にスタッド7bを放射方向に立設し、操舵機能と操舵時に壁面Wに対する滑りを生じさせない差動式駆動機能とを持たせた走行駆動機構と、揚力発生用ダクトファン8及び/または浮力を与えるヘリウムガス気嚢からなる自重量軽減のための揚力装置とを備え、ミッション機器11を搭載保持可能にする。
(もっと読む)
1 - 10 / 44
[ Back to top ]