
国際特許分類[B64C27/10]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 飛行機;ヘリコプタ (2,562) | 回転翼航空機;回転翼航空機特有の回転翼 (398) | ヘリコプタ (211) | 二つ以上の回転翼をもつもの (59) | 共軸に配列されたもの (38)
国際特許分類[B64C27/10]に分類される特許
1 - 10 / 38
自動復元フレームと航空機
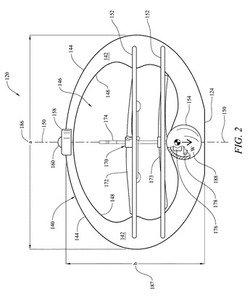
【課題】転倒した姿勢から直立姿勢へ自動的に復元する航空機を提供する。
【解決手段】自動復元中央垂直軸から上方へ向けて伸びる突起部158を有する自動復元フレーム構成140を有している。フレーム構成内の中央ボイド146内部に設置することができ、浮上力を発生させる。電源176は自動復元フレーム内の中央ボイド内部に設置され、稼働可能状態で最低一つのローター172,173に接続され、そのローターに回転可能な電力を供給する。自動復元フレーム内の中央ボイド内部には、航空機を遠隔操作で離陸、飛行、着陸させるために電源に通信可能な状態で相互接続された、遠隔操作指令を受信するための電子装置178も設置されている。
(もっと読む)
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置
同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターのリンケージ装置が提供される。上記リンケージ装置は、サーボステアリングエンジン動作システム、テールモーター動作システム、及び受信機制御装置(4)を備えている。上記サーボステアリングエンジン動作システムは、前後動サーボステアリングエンジン動作ユニット、及び左右動サーボステアリングエンジン動作ユニットを備えている。上記受信機制御装置(4)は、上記サーボステアリングエンジン動作システム及び上記テールモーター動作システムに同時接続され、上記前後動サーボステアリングエンジン動作ユニット及び上記テールモーター動作システムが同時に協働して作動するように制御可能になっている。従来の3チャンネルまたは4チャンネル模型ヘリコプターと比較して、本発明を適用した、同軸反転二重回転プロペラを有する、リモートコントロール模型ヘリコプターは、風抵抗の性能が優れており、屋外の風に対し速く飛行可能という要件を満たす。 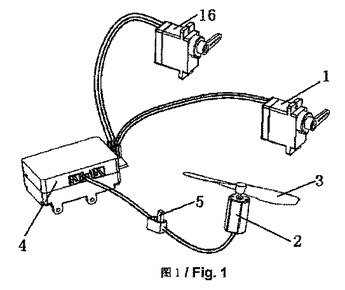 (もっと読む)
(もっと読む)
2重反転プロペラモーター

【課題】2重反転プロペラの反トルクを、各プロペラのそれぞれの全ての任意の回転数、ピッチ,長さ,重さの変化によらず完全に、打ち消したい。
【解決手段】電動モーターの回転子と界磁(ケースプレート)に、それぞれプロペラを取り付け、回転子と同軸の同軸棒と軸受けにより支え、同軸棒に電極、軸受けに給電ブラシを取り付け解決した。
(もっと読む)
飛行機玩具
【課題】
【解決手段】
飛行機玩具において、プロペラ30、胴体50、着陸装置70を備えて、前記プロペラ30は、第1プロペラ310と第2プロペラ320を含み、前記第1プロペラ310は、前記胴体50の頂部に装着されて、前記第2プロペラ320は、前記胴体50と下部の着陸装置70との間で装着される。
(もっと読む)
プロペラ玩具
【課題】 走行及び飛行を可能とし、走行速度を調整することができるとともに、着地時或いは走行終了時に直ちに停止することのできるプロペラ玩具を提供する。
【解決手段】 本発明のプロペラ玩具1は、機体10と、前輪11と、機体10の後部に枢着された連結部材5を介して取付けられた後輪12と、機体10上方へ突出するように取付けられロータ用駆動モータにより回転駆動されるロータシャフト30,40と、該ロータシャフト30,40に取付けられたロータ3,4と、機体10の底面から下方に突出した制動部材と、を備え、制動部材を走行面に接地させて、機体10が僅かに前傾とされた略水平姿勢とされた停止状態にあるときに、ロータ用駆動モータによりロータシャフト30,40を駆動させて、車輪を走行面に接地させた状態で機体10の後部を浮上させた前傾姿勢とさせて走行を開始し、ロータシャフト30,40を更に高速で駆動させることで離陸させて飛行するように構成されている。
(もっと読む)
安定化された安全なジャイロプレーン
本願は、様々な周知のプロセスを利用し後者を特定の方法で集めたものであり、発進エンジンに連結された二重回転翼の一体化に関し、危険性を伴い得る反トルクプロペラを省くことができる。本装置は、自己充足(self−containment)の自然効果の時間が十分となるように配置される。特別な編成(compilation)によって、初めて集められた新技術を、更なる安全性をもたらすeCRT技術であるジャイロプレーン技術の原理に導入する。回転翼を有する航空機は、eCRTセンサによって行われる「無線制御された」eCRTによって支援され、eCRTセンサは、応力下で機械的部品により発生する電磁的不適合を変動させる効果を防止することによって、飛行性能を向上するとともに、応力、寄生、及び変動する反力から、利用可能な動力を自由化する。 (もっと読む)
回転翼輸送手段
【課題】回転翼輸送手段を提供する。
【解決手段】回転翼輸送手段は、細長い管状の背骨または芯を有する本体構造と、ローター群を有する逆回転同軸ローターシステムであって、共通のローター回転軸の周りに該ローター群を駆動するために各ローターがモーターを有するローターシステムとを備える。このローターシステムは、該回転翼輸送手段を有方向飛行させるのに使用される。
(もっと読む)
飛翔ロボット
【課題】 操縦機からの指示に応じて、飛翔ロボットを随意に自動的に空中静止させたり方位維持することができなかった。
【解決手段】
飛翔ロボットの機体の上部と下部とを自在継ぎ手により連結し、該自在継ぎ手を中心として該機体の上部と下部との間の相対傾き角を変える機構をサーボモータで駆動し、機体の傾斜角および/または傾斜角速度を傾斜センサで検出して飛翔ロボットの位置を制御する。また、回転翼の回転軸との傾斜角を変化させる補助翼を、方位センサで検出した方位角速度および/または方位角に基づいて動かし、飛翔ロボットの方位を制御する。
(もっと読む)
二重反転回転翼を有するエンジンを少なくとも1つ備えた航空機
航空機(50)は二重反転回転翼を有するエンジンを少なくとも1つ備え、少なくとも1つのエンジンが少なくとも1つの楕円(70)に関係する不均衡を有する。上記航空機は、所定のエンジン速度において、楕円又は少なくとも1つの楕円の長軸(68)が、エンジンによって発生する振動が航空機の少なくとも1つの所定の部位、特に所定のエリアにおいて最小強度になるように、エンジンを制御する手段を含んでいる。 (もっと読む)
位相同期によって制御されるエンジンを備える航空機
本発明の航空機(50)は、二重反転回転翼を有するエンジンを少なくとも1つ備え、少なくとも1つのエンジンが少なくとも1つの楕円(70)に関係する不均衡を有する。上記航空機は、所定のエンジン速度で、楕円の、又は複数の楕円のうちの少なくとも1つの長軸(68)の少なくとも1つの所定の共通方向において、上記ダンパの2つの端部に対する速度が該ダンパの他の配置における当該速度よりも大きいような配置で取り付けられた少なくとも1つの振動ダンパ(64,66)を含んでいる。 (もっと読む)
1 - 10 / 38
[ Back to top ]