
国際特許分類[F16C32/00]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 軸;たわみ軸;たわみ被覆の中で運動を伝達するための機械的な手段;クランク軸機構の要素;ピボット;枢着;伝動装置,継ぎ手,クラッチまたはブレーキ要素以外の回転工学の要素;軸受 (45,306) | その他の軸受 (931)
国際特許分類[F16C32/00]の下位に属する分類
ナイフエッジ軸受
磁気的または電気的な支持手段を用いるもの (405)
軸の運動以外に,少なくとも広区域にわたって形成された流体クッションにより支持された運動部材をもつもの,例.静圧空気軸受 (420)
国際特許分類[F16C32/00]に分類される特許
101 - 106 / 106
薄型スラスト・ジャーナル板流体動圧軸受モータ
本発明は、限定された軸線方向空間を有する超小型形状ファクターでの使用に適するハブ/軸/スラスト板組立体のスラスト板上の流体動圧軸受を提供するものである。  (もっと読む)
(もっと読む)
金型加工装置
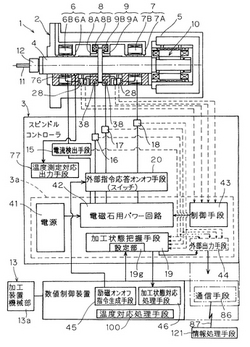
【課題】 主軸の高速回転が可能で、高回転精度、高静剛性・動剛性を有し、高能率で高精度な加工が行える金型加工装置を提供する。
【解決手段】 工具11を回転させるスピンドル装置1の主軸4を、静圧磁気複合軸受6〜9で支持し、次の手段を設ける。静圧磁気複合軸受6〜9の励磁電流を検出する電流検出手段15〜18と、その電流検出値から加工状態を把握する加工状態把握手段19を設ける。外部指令応答オンオフ手段20を設け、静圧磁気複合軸受6〜9は、外部の指令で静圧気体軸受部のみによる支持を可能とする。ハウジング5の温度を測定する手段76と、温度測定対応出力手段77とを設ける。
(もっと読む)
磁気軸受装置

【課題】 正常な変位センサのキャリブレーションができないことによる不具合をなくすことができる磁気軸受装置を提供する。
【解決手段】 磁気軸受装置は、回転体4と、電磁石26,27,28の磁気吸引力により回転体4を非接触支持する磁気軸受5,6,7と、回転体4の変位を検出するための変位センサ23,29,30と、回転体4を回転させる電動モータ9と、回転体4の回転数を検出するための回転センサ10と、タッチダウン用の保護軸受11,12と、変位センサ23,29,30の出力に基づいて磁気軸受5,6,7の電磁石26,27,2を制御するとともに回転センサ10の出力に基づいて電動モータ9を制御する制御手段とを備えている。制御手段が、磁気軸受5,6,7の起動時において、回転センサ10の出力から回転体4の回転の有無を判別し、回転体4が回転しているときには変位センサ23,29,30のキャリブレーションを行なわず、回転体4が回転していないときには変位センサ23,29,30のキャリブレーションを行なう。
(もっと読む)
動圧空気軸受モータ
【課題】動圧空気軸受モータにおいて、スラスト剛性を解決し、低振動・低騒音で信頼性の高いモータを得ることを目的とする。
【解決手段】シャフト1の先端には、磁気スラスト軸受の第一手段である固定側磁気スラストマグネット11と固定側磁気スラストマグネット11の外周に吸引方向で着磁されている回転側磁気スラストマグネット12が配置され、吸引力F1で吸引されている。磁気スラスト軸受の第二手段は、ロータマグネット7と、鉄からなる基板4との吸引力F2で構成される。
(もっと読む)
流体膜軸受の不安定性制御方法
【課題】
【解決手段】 流体膜軸受と組み合わせた磁気軸受を使用することで流体膜軸受の不安定性を制御する方法(流体膜軸受が、円筒型ジャーナル軸受、楕円軸受、オフセットハーフ軸受、多円弧型軸受、フォイル軸受、あるいはティルティングパッド軸受であるかどうかは問わない)において、流体膜軸受が主耐荷軸受として作用し、磁気軸受がこの流体膜軸受の不安定性を制御する。この効果的な組み合わせによって、安定性の問題も信頼性の問題もなく高速で使用できる軸受が提供される。流体膜軸受の不安定性を制御する代替の方法は、軸方向におけるフローを妨害することである。例えば、スリーブ(ジャーナル)軸受は、軸受軸をシャフト軸に対して傾けて製造することができ、あるいは、可変ジオメトリの軸受は、軸受の角度ミスアラインメントを作るように製造することができる。
(もっと読む)
正逆回転制御装置
【課題】携帯型の結束機等に使用して結束バンドの駆動を小型軽量に実現可能にする正逆回転制御装置を提供すること。
【解決手段】モータ13等で回転駆動される軸10およびこの軸10に挿通される少なくとも2個の一方向ベアリング11、12により構成される。軸10を正方向へ回転すると、一方向ベアリング11のみが同じ方向且つ同じ速度で回転する。他方、軸10を逆方向へ回転すると、一方向ベアリング12のみが同じ方向且つ同じ速度で回転する。これらベアリング11、12には、それぞれギア組立体14、15等が回転可能に結合される。
(もっと読む)
101 - 106 / 106
[ Back to top ]